Showing 120 of 120on this page. Filters & sort apply to loaded results; URL updates for sharing.120 of 120 on this page
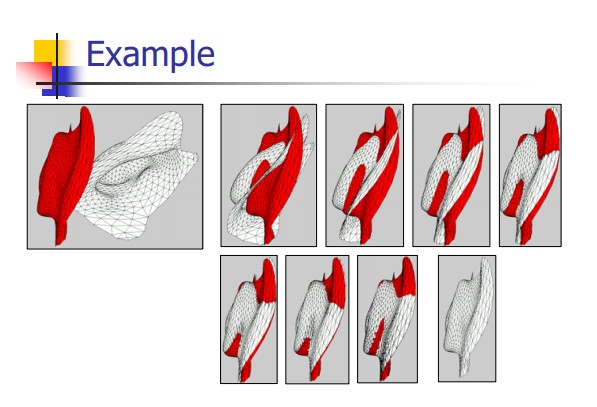
PCL ICP Registration using five images, each acquired at an increment ...
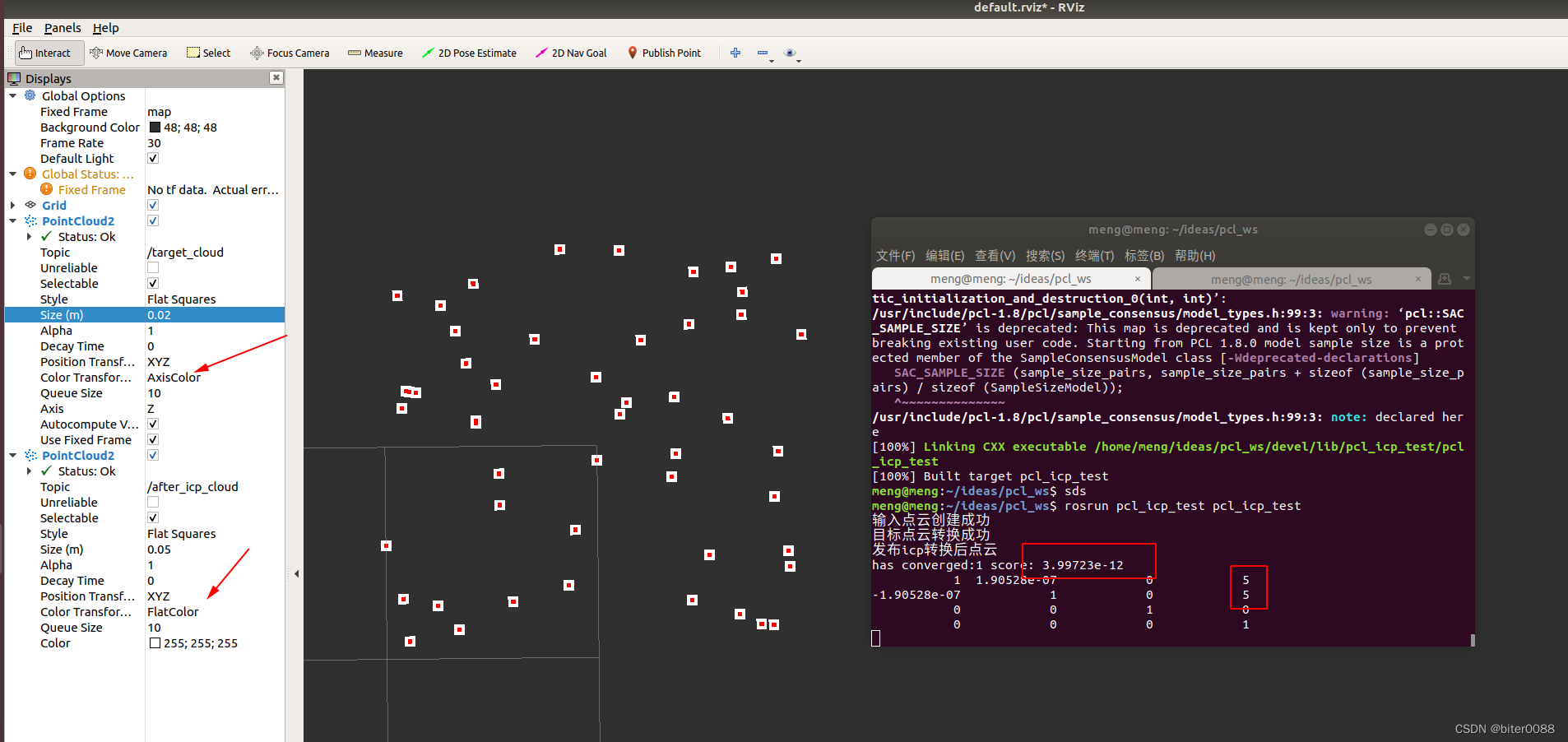
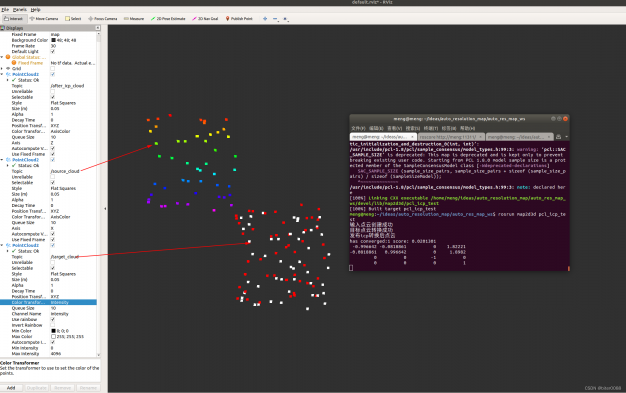
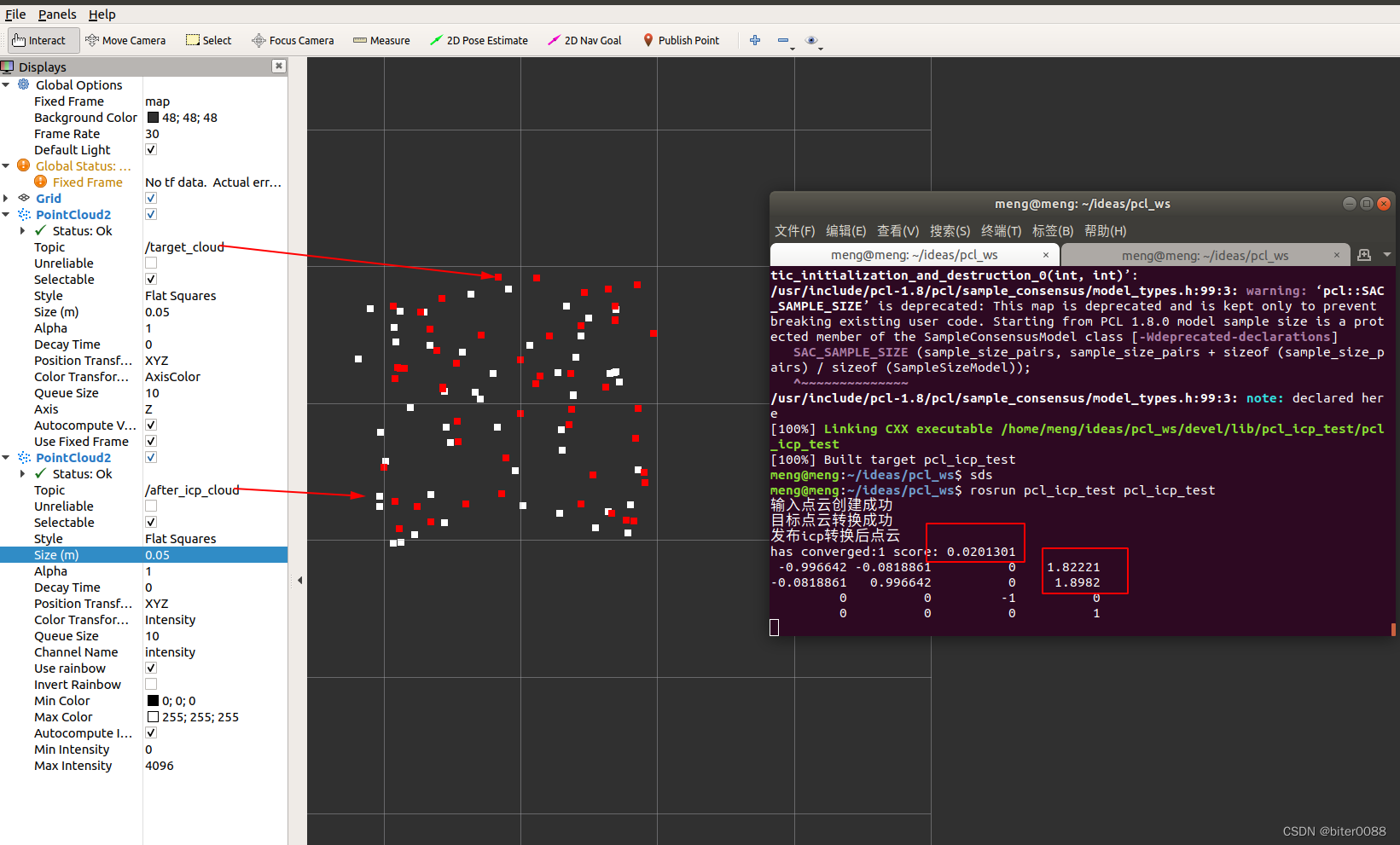
PCL 之 ICP 算法实现_icp.setmaxcorrespondencedistance-CSDN博客
c++ - PCL ICP function does not add the second point cloud - Stack Overflow
computer vision - Using ICP in PCL cannot be registered correctly even ...
python icp 点云配准 pcl 点云配准_mob64ca13fe1aa6的技术博客_51CTO博客
PCL interactive ICP when express space key | by PointCloud-Slam-Image ...
pcl 点云配准 ICP SAC和LM_ICP_lm-icp点云精配准-CSDN博客
ICP in PCL Registration - Programmer Sought
点云处理入门 RANSAC & ICP with PCL Demo - 知乎
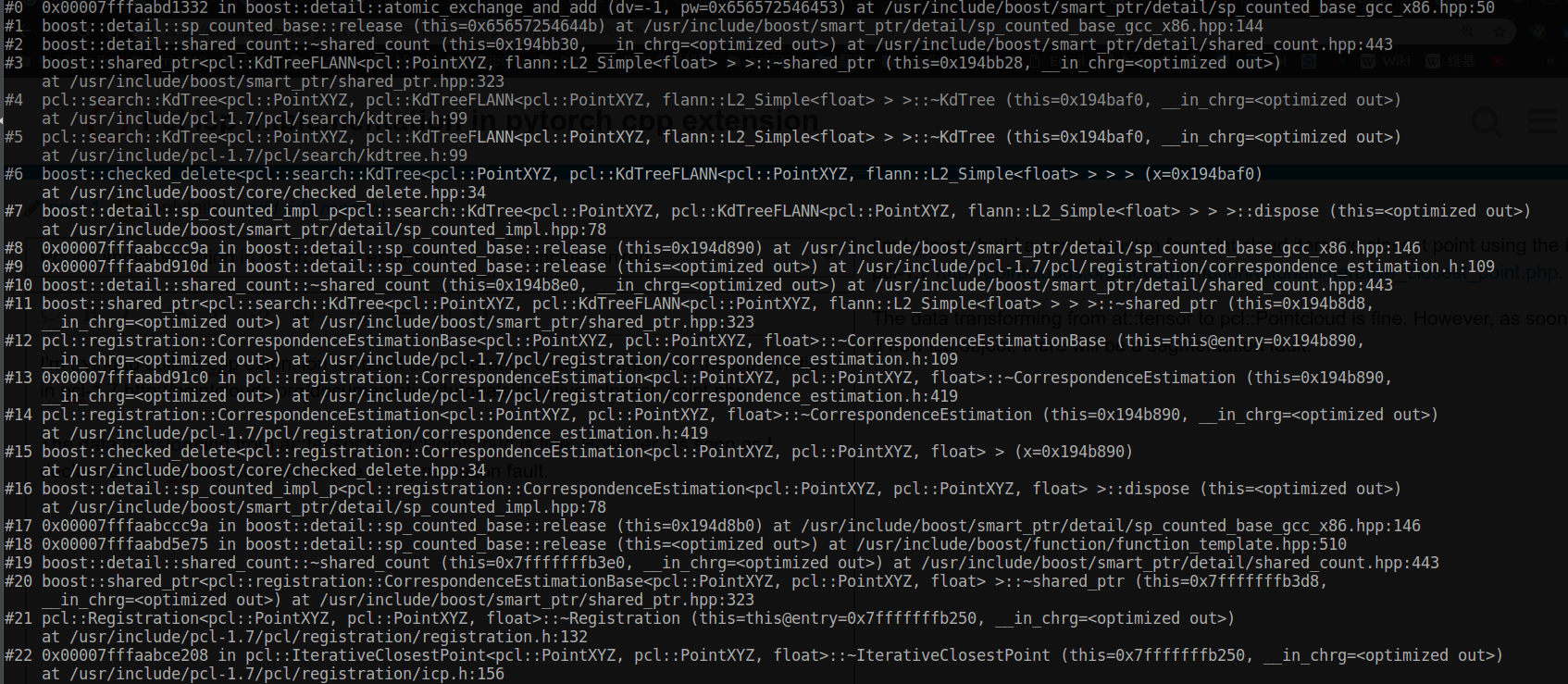
Pcl icp implementation in pytorch cpp extension - PyTorch Forums
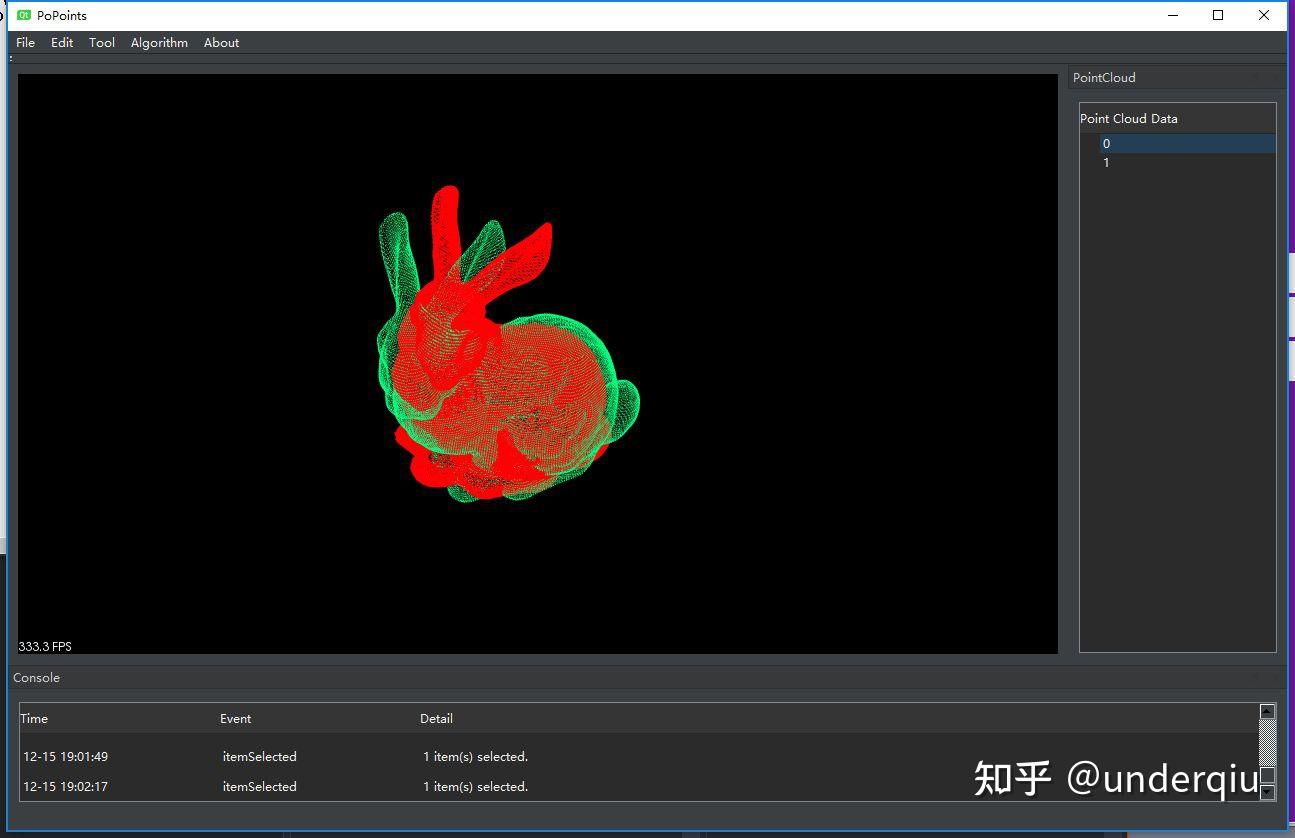
PCL ICP点云配准 - 知乎
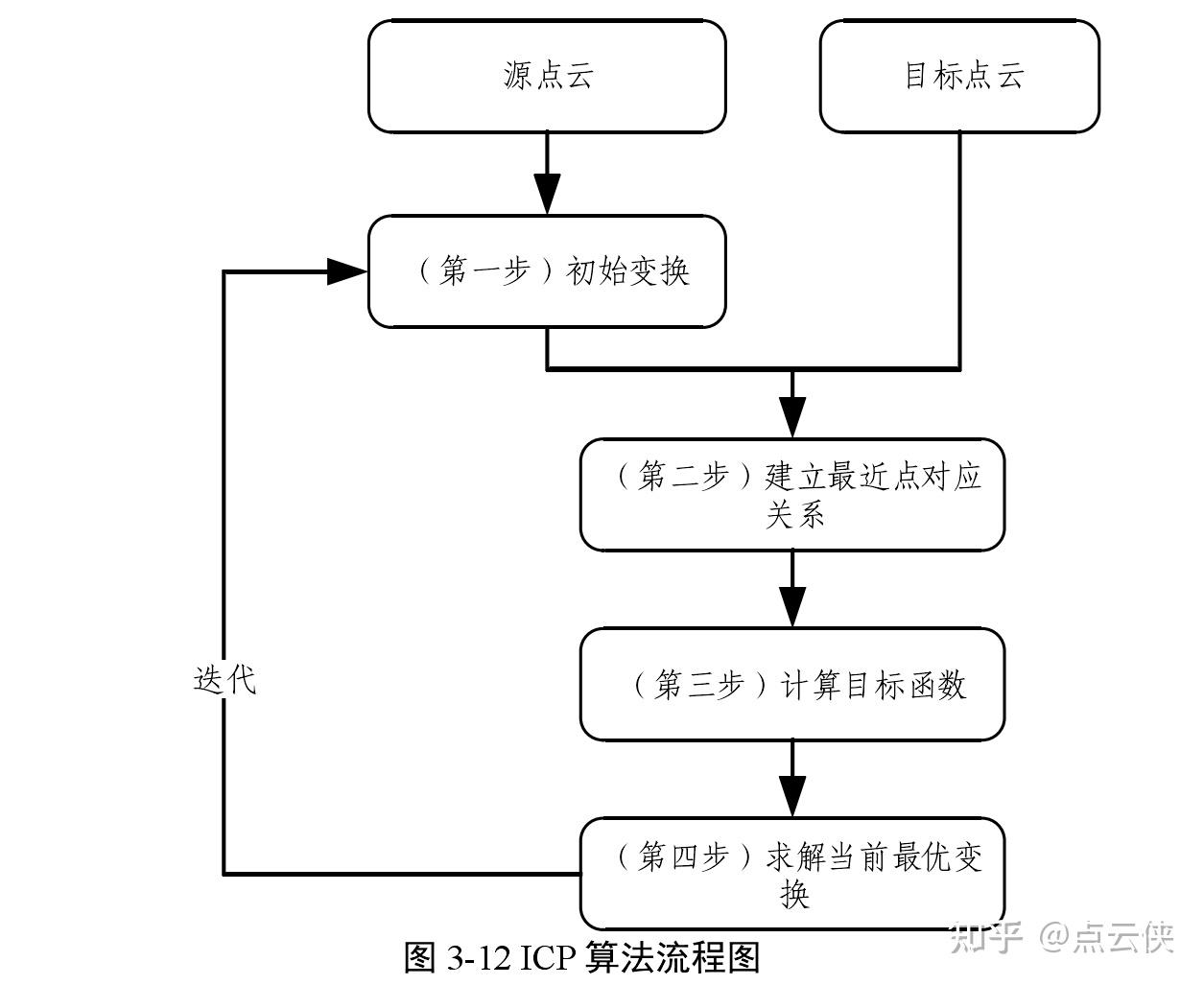
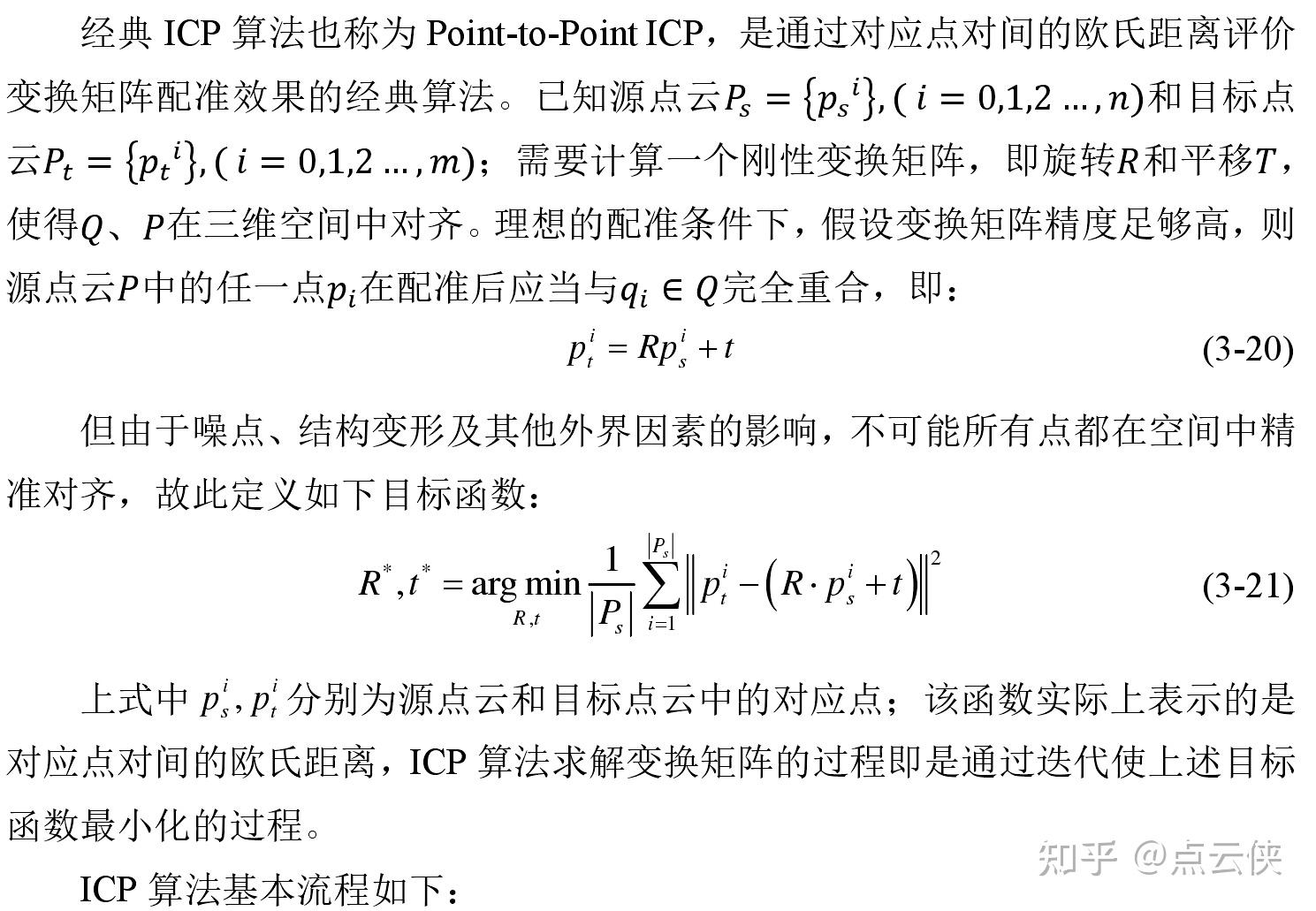
PCL ICP算法概述总结-CSDN博客
GitHub - yantrabuddhi/pcl-icp: pointcloud lib, eigen3 icp
GitHub - ntuapril/pcl-ICP: c++ code for ICP
PCL 使用ICP点云拼接_pcl点云拼接-CSDN博客
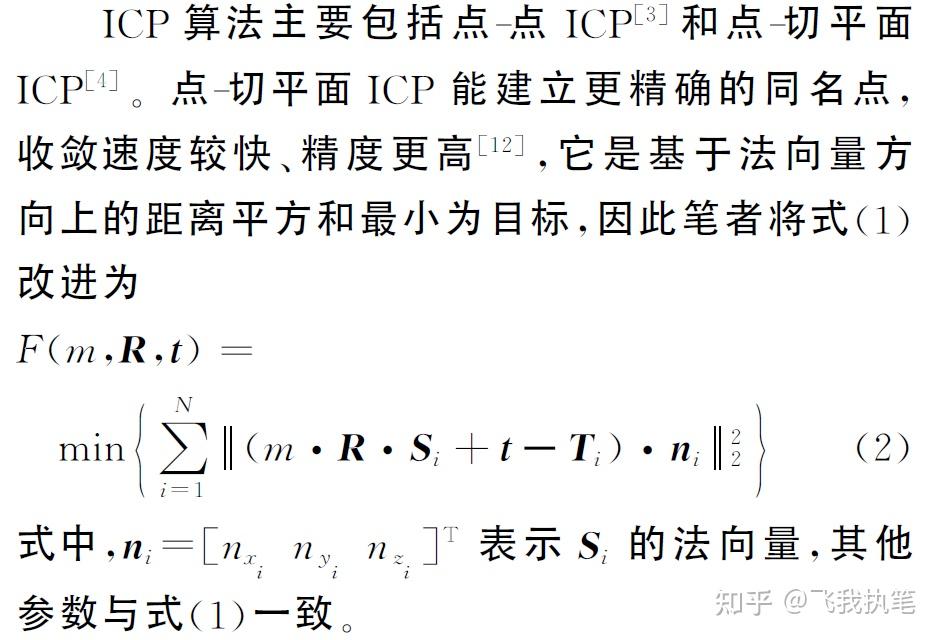
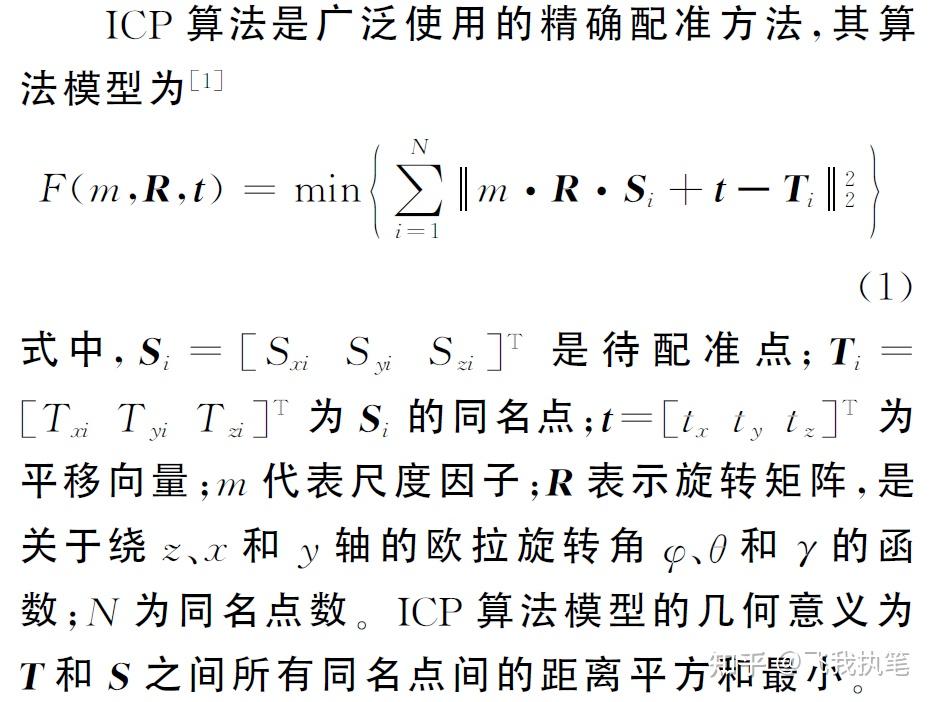
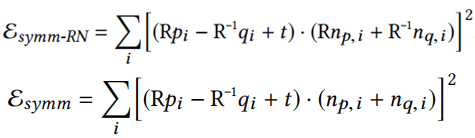
PCL 点-切平面ICP实现点云精配准 - 知乎
PCL ICP配准【点到面】(Registration_ICP)_点到面icp-CSDN博客
pcl的ICP算法_csdn pcl icp-CSDN博客
PCL LM-ICP算法实现点云精配准 - 知乎
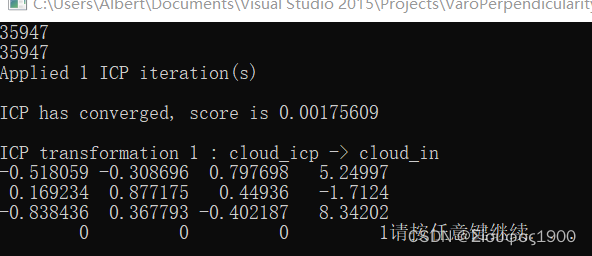
PCL ICP算法实现点云精配准_点云侠的博客-CSDN博客
PCL dependency · Issue #7 · Lab-of-AI-and-Robotics/GS_ICP_SLAM · GitHub
PCL Trimmed ICP实现点云精配准 - 知乎
PCL ICP配准【点到面】(Registration_ICP)_点到面的icp-CSDN博客
ICP for point cloud alignment — Pyoints 0.2.0 documentation
PCL 点到面的ICP算法实现点云配准(C++详细过程版)_点到面的icp算法代码-CSDN博客
PCL 点云配准 KD-ICP算法(精配准)-EW帮帮网
点云配准经典方法——ICP 原理推导及PCL实现_icp点云配准-CSDN博客
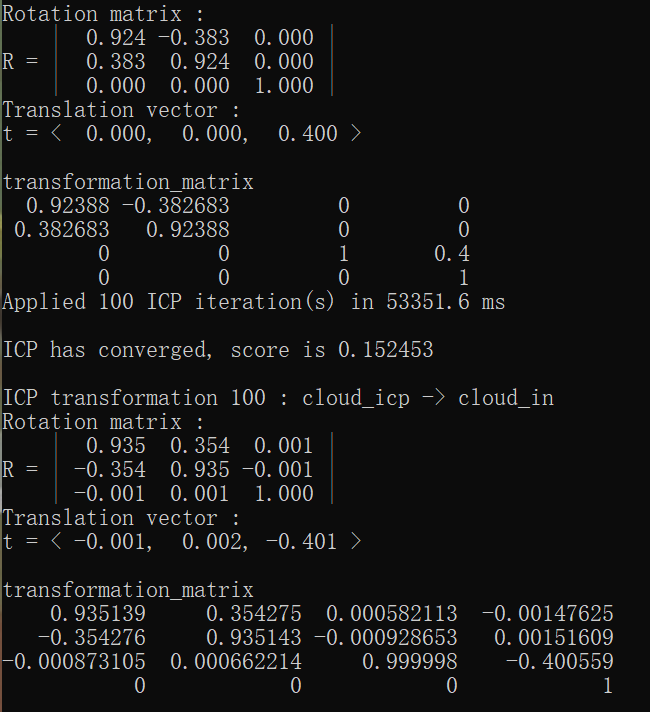
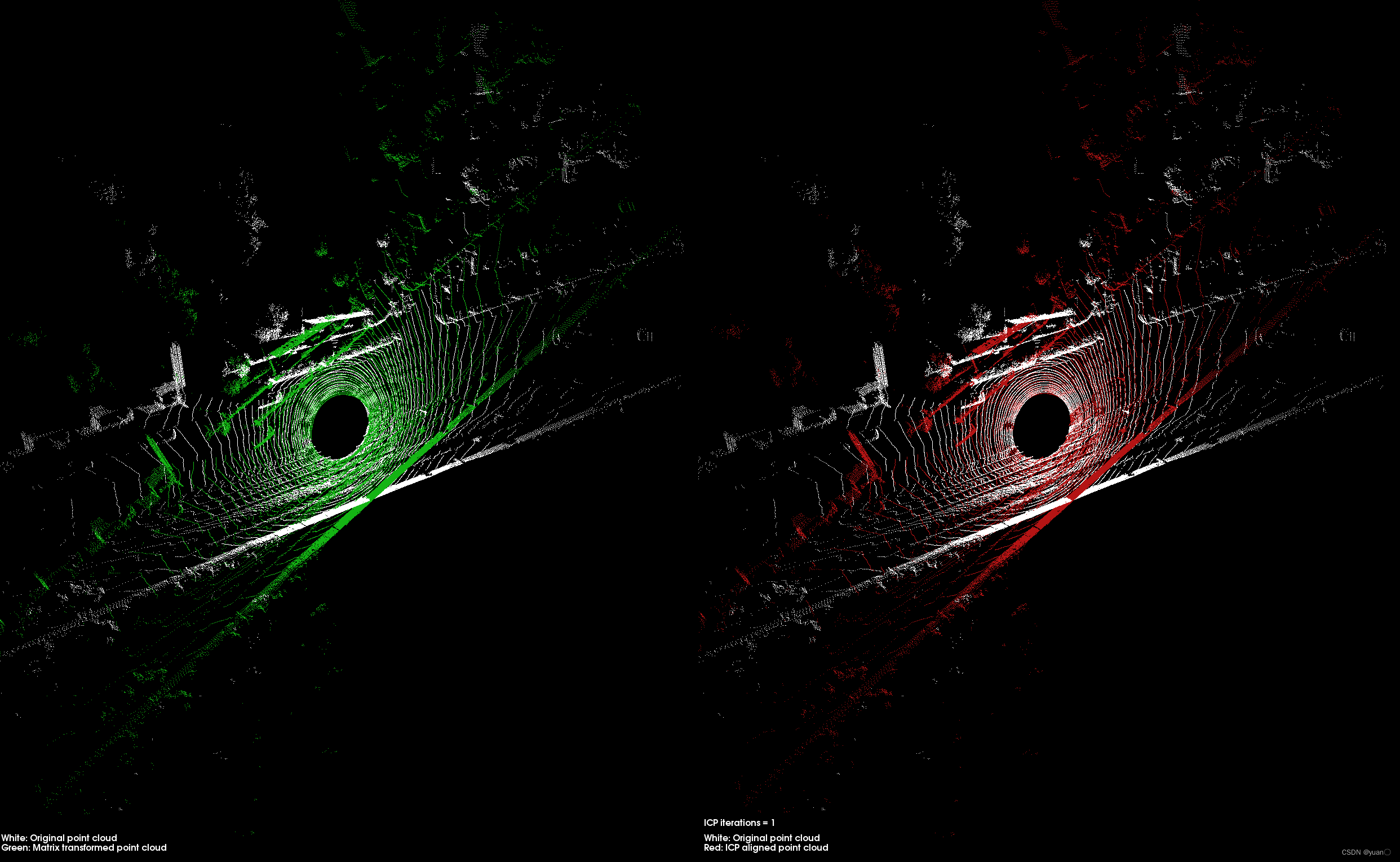
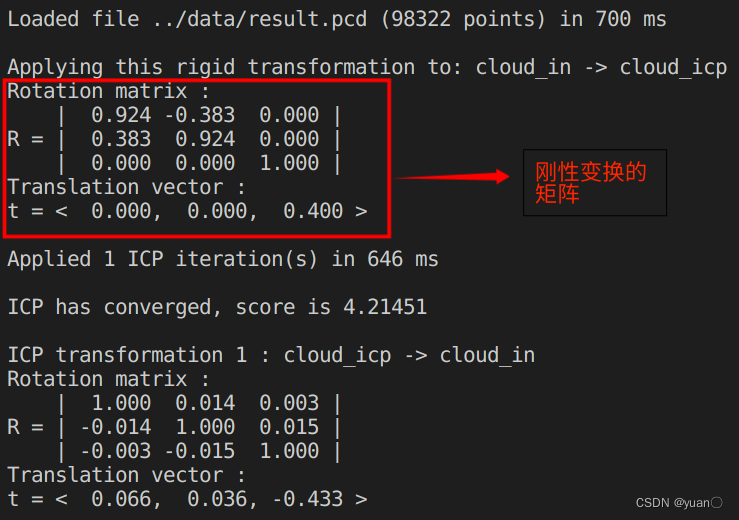
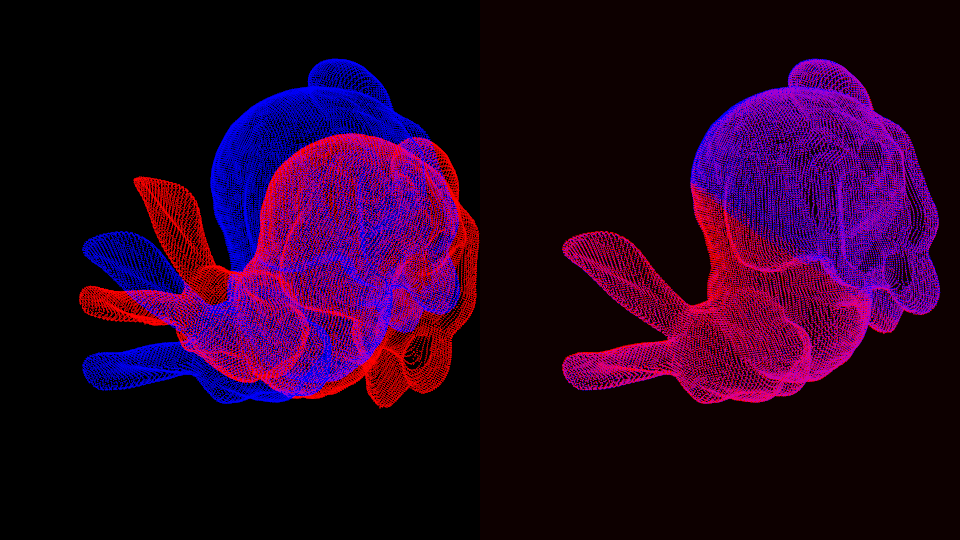
【PCL】教程 interactive_icp.cpp 使用ICP算法对3D点云进行准确的对齐,并通过可视化展示算法的迭代过程...-CSDN博客
PCL学习笔记二:Registration (ICP算法)_not enough correspondences found. relax ...
PCL之ICP算法_51CTO博客_pcl icp算法
【PCL 点云配准】Iterative Closest Point(ICP) - 知乎
pcl调用icp算法拼接两个点云_pcl icp多视角点云拼接-CSDN博客
PCL之——点云配准算法ICP_pcl icp-CSDN博客
PCL学习笔记(38)——交互式ICP_pcl::hasconverged()-CSDN博客
PCL最近点迭代ICP算法实现点云配准_c++ pcl点云icp配准融合-CSDN博客
点云配准(PCL+ICP)-CSDN博客
初学PCL(四):ICP算法代码实现-CSDN博客
【PCL】—— 点云配准ICP(Iterative Closest Point)算法_icp点云配准-CSDN博客
(一)PCL库 ICP配准_pcl kd-icp-CSDN博客
基于PCL的ICP及其变种算法实现_pcl icp-CSDN博客
PCLの中のGeneralized ICPの使い方 - gggggraziegrazie
《PCL多线程加速处理》-配准-icp_pcl::transformpointcloud 多线程加速-CSDN博客
pcl/icp.cpp at master · PointCloudLibrary/pcl · GitHub
pcl点云库(1):迭代最近点算法(icp)算法实践及解析_setmaxcorrespondencedistance-CSDN博客
GitHub - Stan994265/PCL-ICP-NDT: This is sample lidar ICP/NDT code by ...
【PCL】ICP 源码分析_pcl estimaterigidtransform-CSDN博客
PCL|ICP|Interactive Iterative Closest Point|代码实践 - 知乎
PCL--点到面ICP配准(带法线)-CSDN博客
PCL_ ICP迭代最近点_pcl iterativeclosestpoint-CSDN博客
pcl点云库(1):迭代最近点算法(icp)算法实践及解析 - 古月居
GitHub - seven-linglx/icp: 基于PCL,分别实现了point2point,point2plane ...
使用PCL库ICP算法拼接多幅点云的C++实现-开发者社区-阿里云
PCL中的点云ICP配准(附源代码和数据)_pcl点云模型匹配相减-CSDN博客
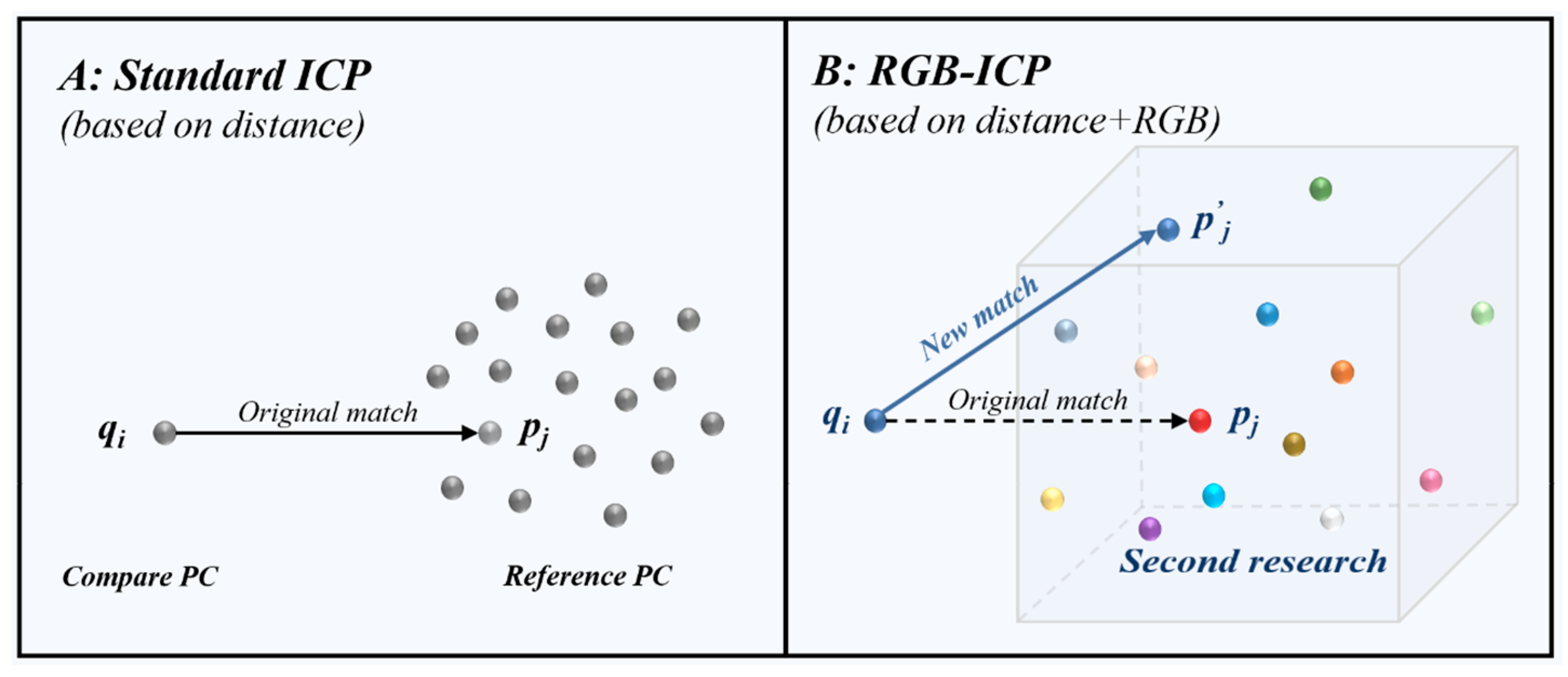
RGB-ICP Method to Calculate Ground Three-Dimensional Deformation Based ...
PCL库简单的icp配准_pcl icp设置初值-CSDN博客
PCL中的点云配准(Registration)ICP算法_pcl icp-CSDN博客
PCL点云库SAC-IA+ICP点云配准拼接_pcl sacia-CSDN博客
点云库PCL学习——ICP交互配准_icp.getfitnessscore()-CSDN博客
初学PCL(四):用ICP算法匹配连续时刻的点云数据_pcl icp-CSDN博客
Comparison between PCL-ICP and GPIS-S2SPR with examples from the large ...
ICP算法加速优化--多线程和GPU_cuda实现icp-CSDN博客
【PCL自学:Registration 2】如何使用ICP及如何实现增量配准_pcl的icp的使用技巧-CSDN博客
[icp] pcl::IterativeClosestPoint crash when encountering an invalid ...
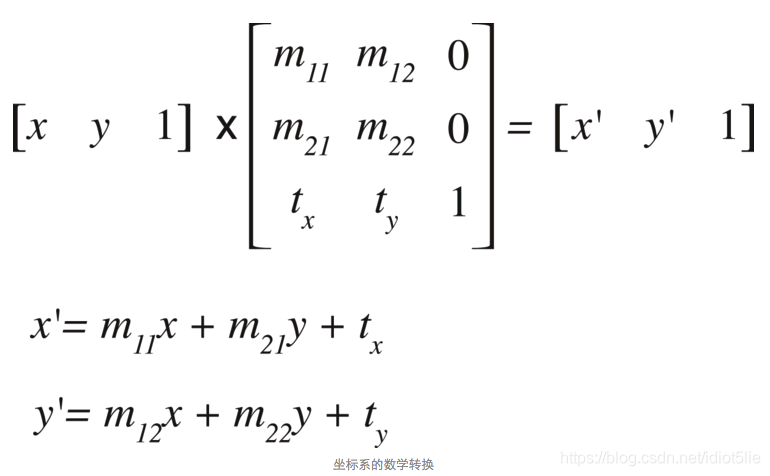
【PCL】ICP(Iterative Closest Point)原理剖析——仿射变换(Affine Transformation)数学模型 ...
(学习笔记)PCL点云库的基本使用-CSDN博客
pcl: icp.h File Reference
PCL_icp源码笔记_icp.setinputtarget-CSDN博客
PCL学习九:Registration-配准_pcl::registration-CSDN博客
PCL_icp源码笔记_pcl库 icp源码-CSDN博客
PCL点云库:ICP算法 - XXX已失联 - 博客园
PCL配准——粗配准+ICP - Ytytyty - 博客园
Pinterest
【点云配准】ICP算法详述 + 代码注释_icp getfinaltransformation-CSDN博客
PCL如何使用ICP(iterative closest point)算法_Asher_zheng的博客-CSDN博客_pcl使用icp
PCL中のGeneralized ICPを調査してわかったことメモ - gggggraziegrazie