Showing 120 of 120on this page. Filters & sort apply to loaded results; URL updates for sharing.120 of 120 on this page
lioSAM algorithm testing with lidar dataset - YouTube
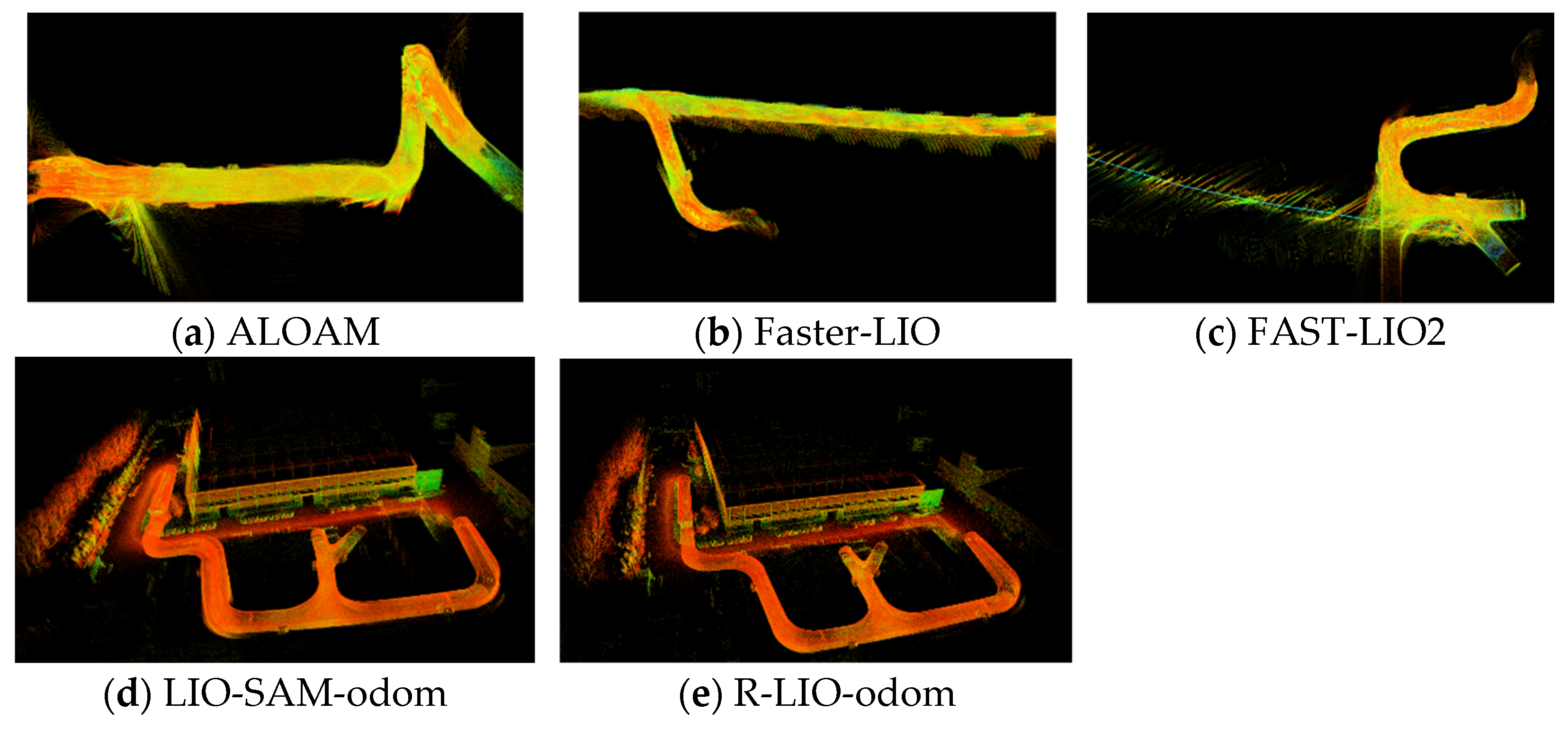
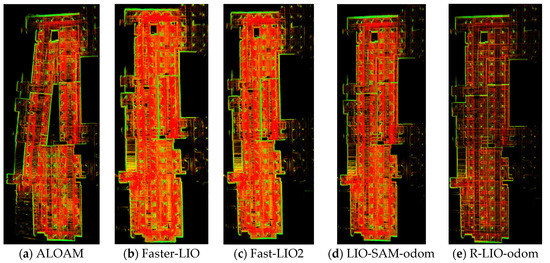
Qualitative odometry results of LIOSAM and FASTLIO−SC approaches. To ...
如何解读 liosam 定位的原理? - 知乎
如何解读 liosam 算法? - 知乎
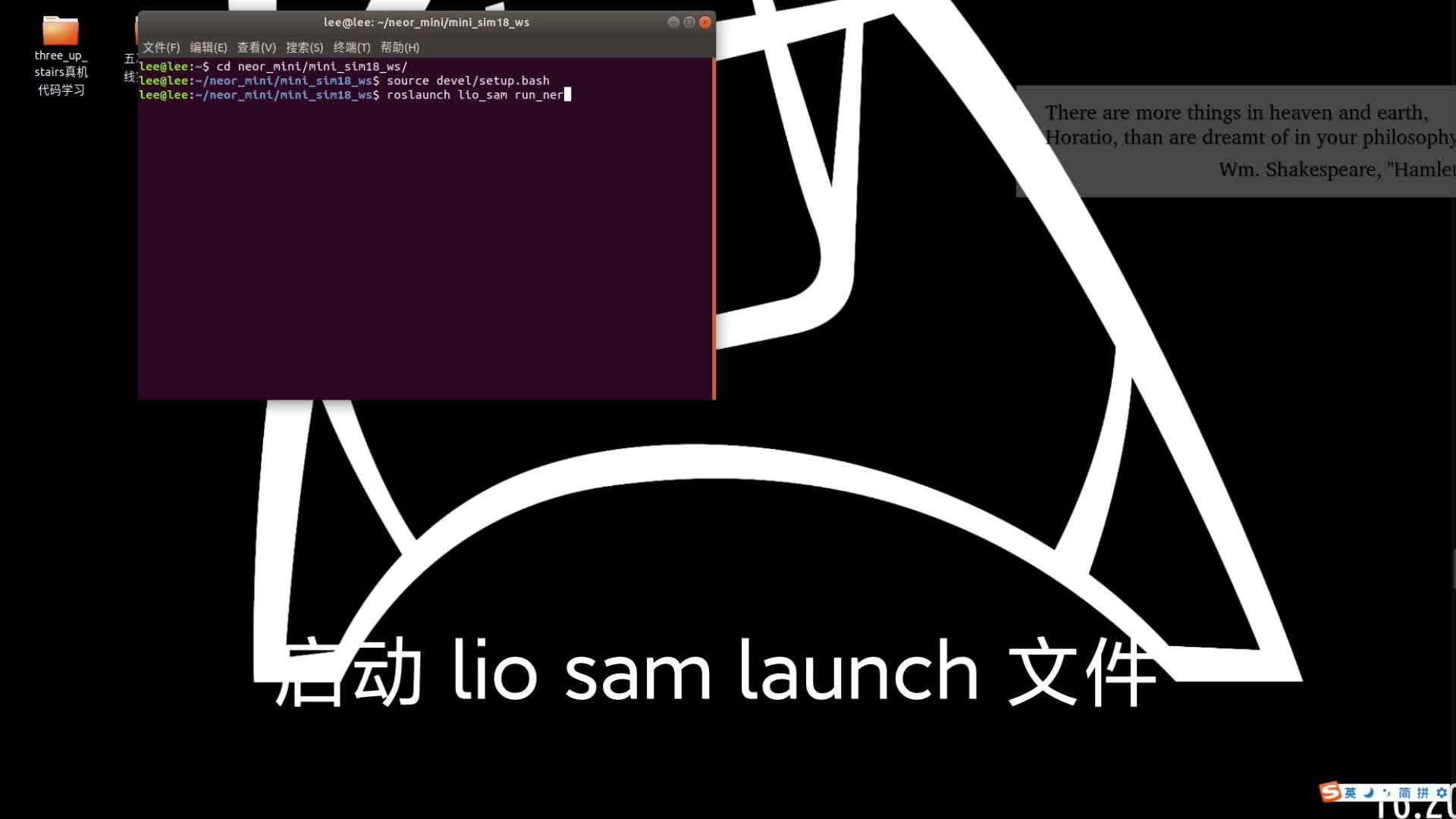
手把手教你Velodyne Lidar仿真+LIO_SAM建图 - 知乎
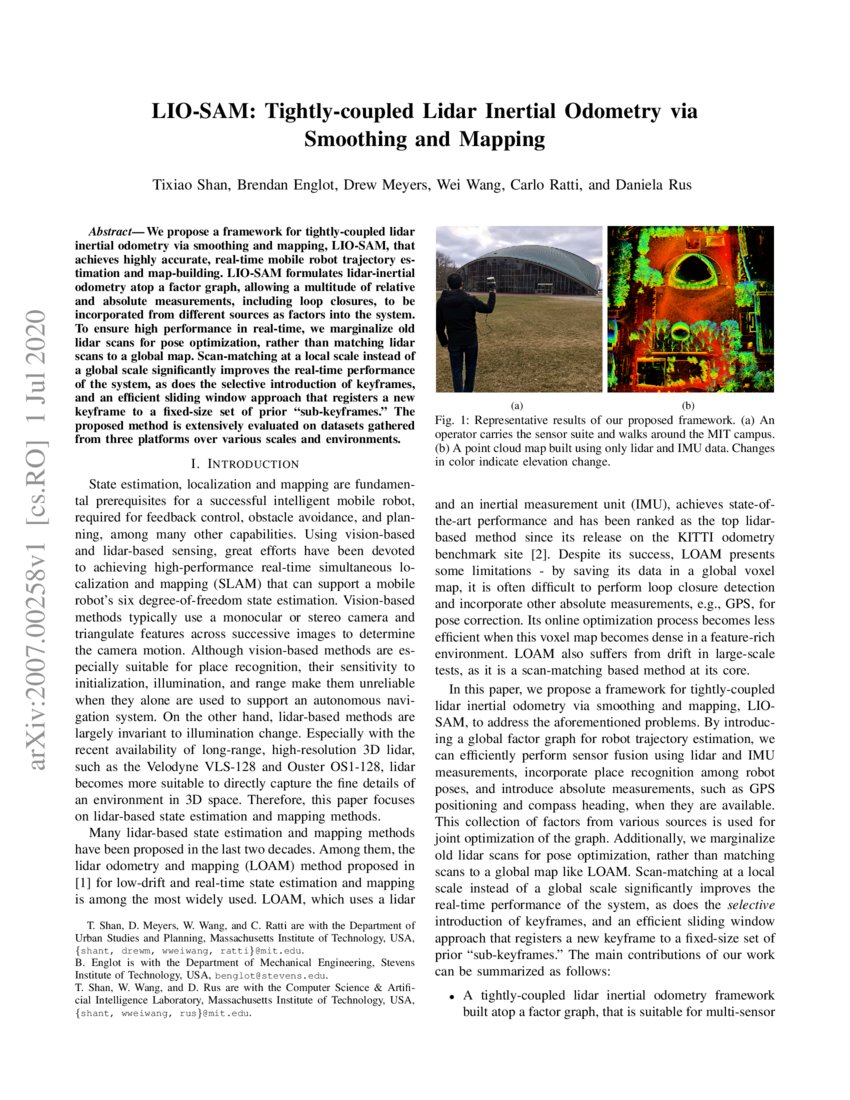
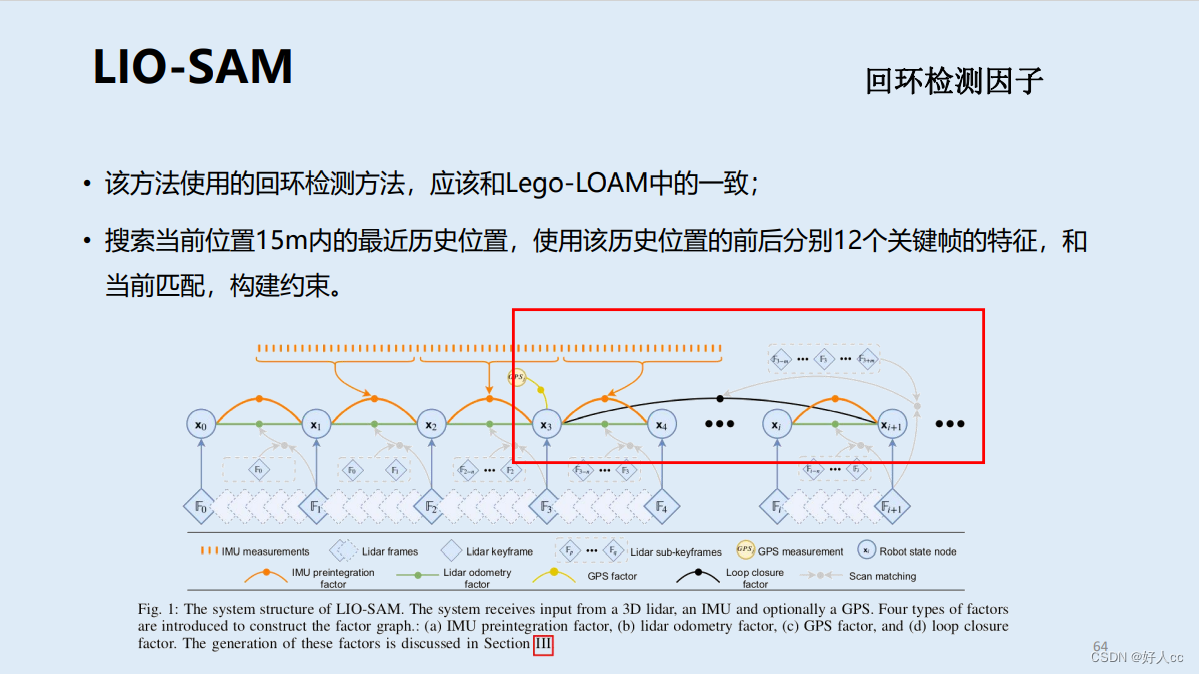
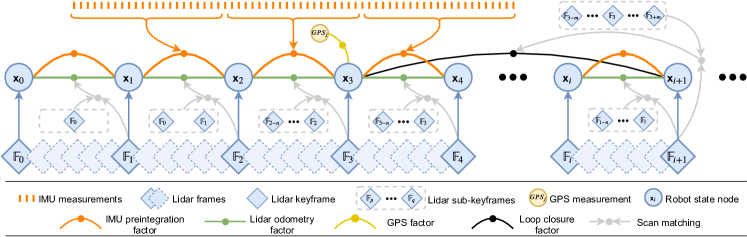
LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and ...
从LOAM到LIO-SAM_lioloam-CSDN博客
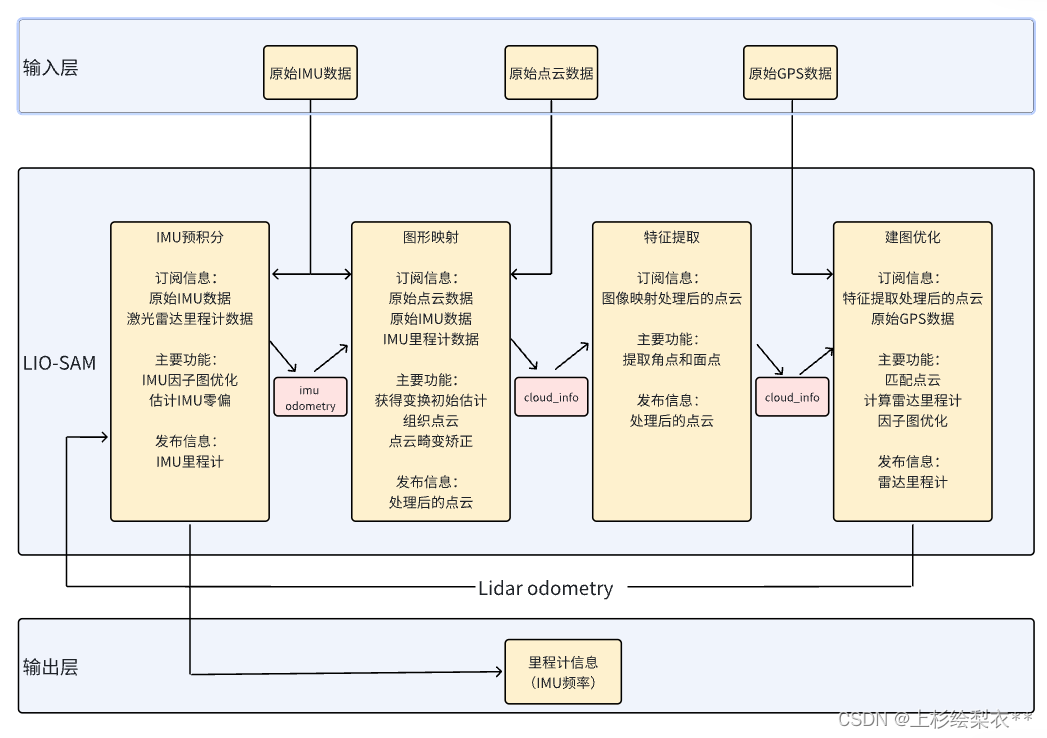
LIO-SAM超级详细源码流程图_lio-sam 因子图 增量式 更新-CSDN博客
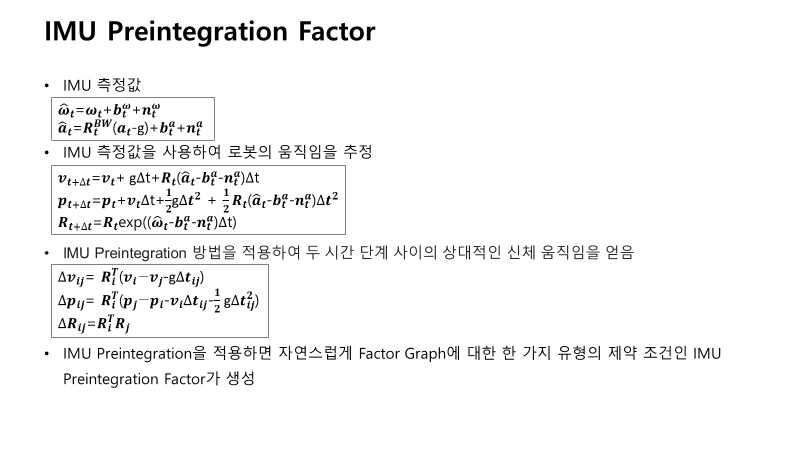
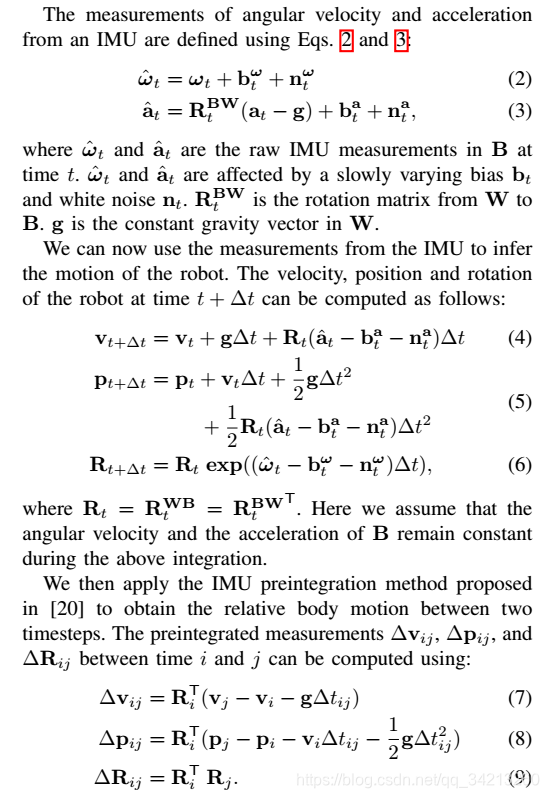
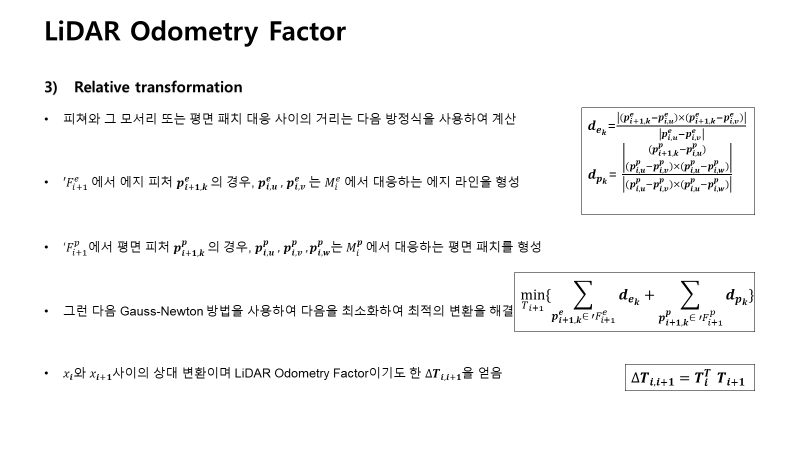
【LIO-SAM论文全文翻译】:LIO-SAM: Tightly-coupled Lidar Inertial Odometry via ...
(PDF) LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing ...
【文献解析】LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing ...
激光雷达和IMU联合标定并运行LIOSAM_liosam imu标定-CSDN博客
【论文阅读】LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing ...
3D激光雷达-Robotsense使用---LIO_SAM测试_liosam robotsense-CSDN博客
[PDF] LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing ...
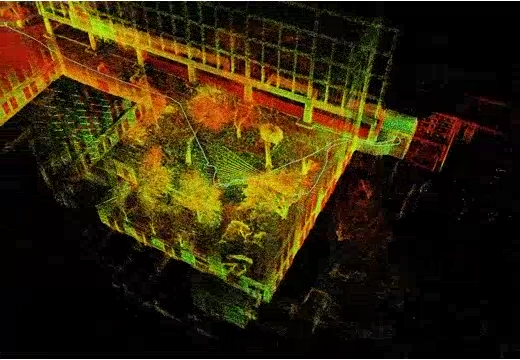
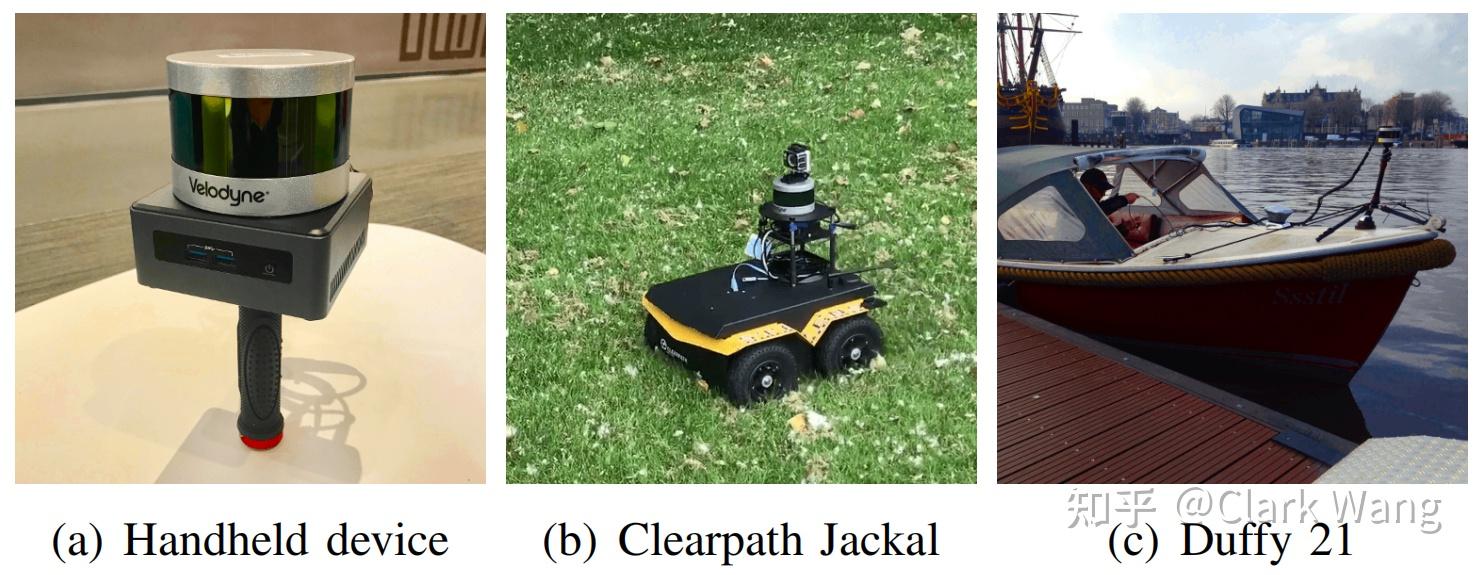
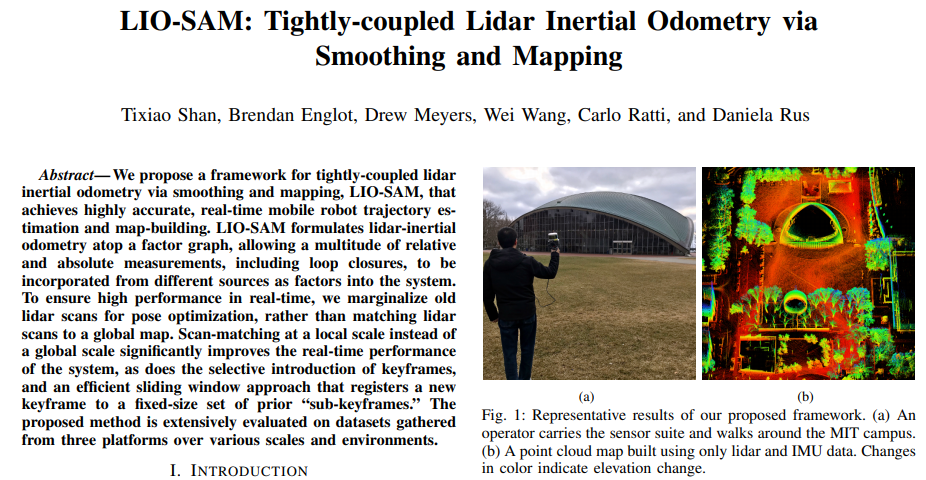
Representative results of LIO-SAM [111]. a An operator carries the ...
Demo of LIO-SAM: Tightly-coupled LiDAR-Inertial Odometry via Smoothing ...
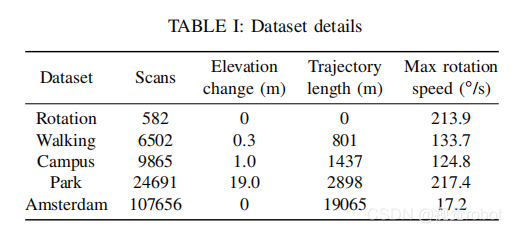
R-LIO: Rotating Lidar Inertial Odometry and Mapping
[2007.00258] LIO-SAM: Tightly-coupled Lidar Inertial Odometry via ...
lidar-imu calibration---lidar_align+运行liosam算法测试标定效果_liosam传感器标定-CSDN博客
GitHub - TixiaoShan/LIO-SAM: LIO-SAM: Tightly-coupled Lidar Inertial ...
GitHub - lvruichen/Ground-LIO-SAM: LIO-SAM: Tightly-coupled Lidar ...
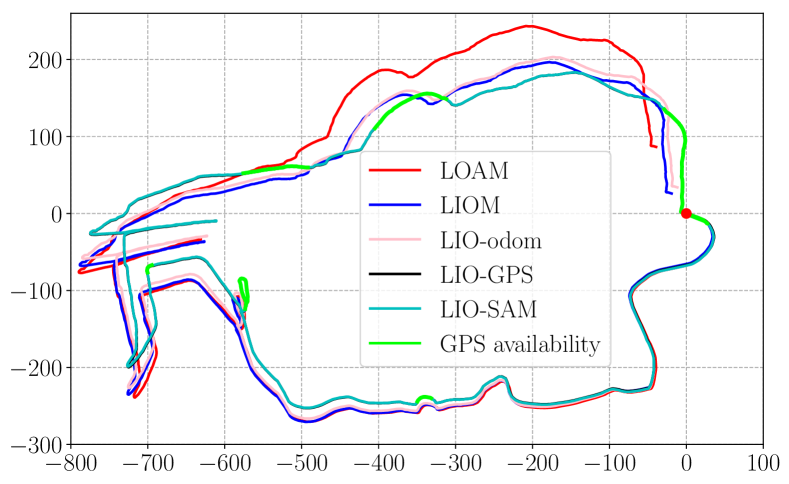
General scheme of the implemented localization and mapping approaches ...
High-Precision SLAM Based on the Tight Coupling of Dual Lidar Inertial ...
[논문리뷰]LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing ...
Tightly Coupled 3D Lidar Inertial Odometry and Mapping - 知乎
LIO-SAM中imuConvert函数解析(lidar坐标系与imu坐标系的转换)_lidar 坐标系转imu-CSDN博客
论文笔记-LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and ...
GitHub - mfkiwl/LIO-SAM-ultra-tight-GNSS: LIO-SAM: Tightly-coupled ...
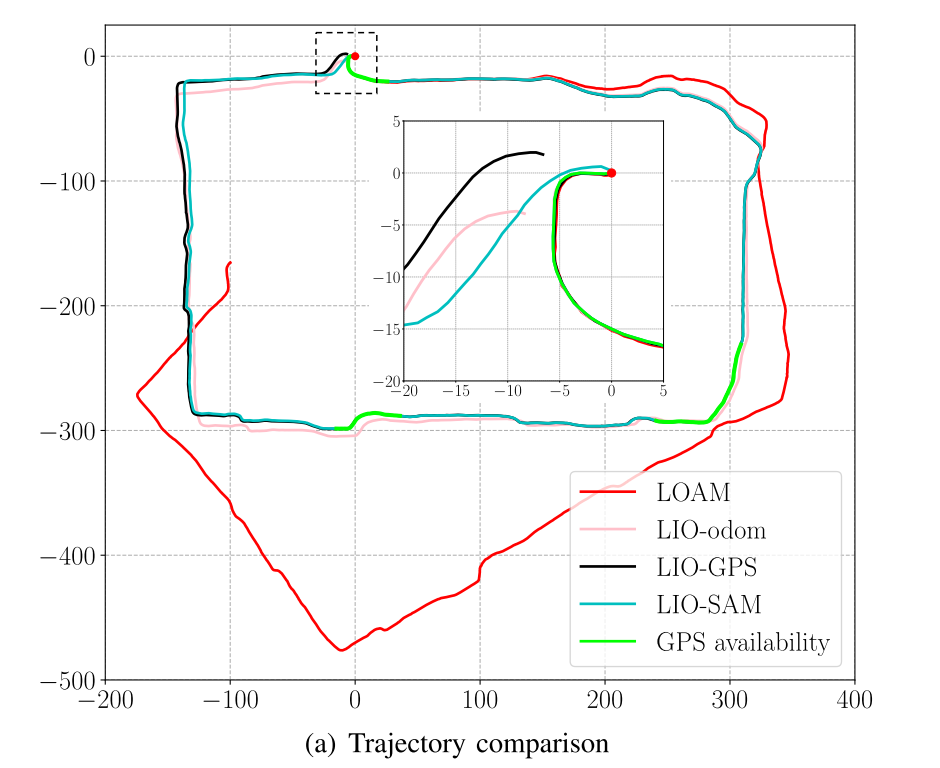
APE of our method, LVI-SAM, and LIO-SAM. | Download Scientific Diagram
Jay Menon
LIO-SAM-CSDN博客
基于LIO-SAM 算法的三维激光SLAM 建图_liosam建图结果-CSDN博客
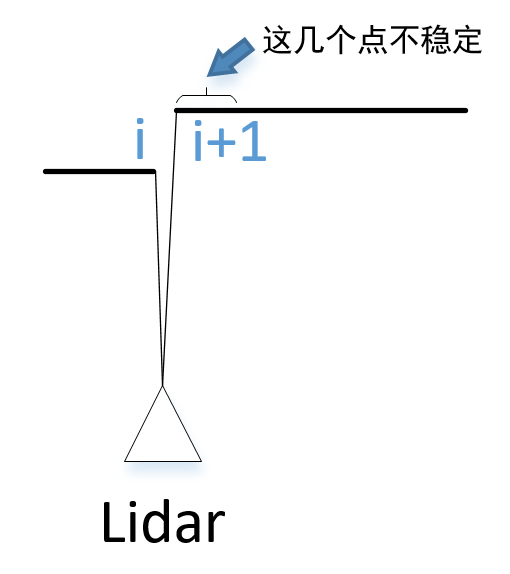
3d激光slam:LIO-SAM框架---特征点提取_tightly-coupled lidar inertial odometry via ...
VE-LIOM: A Versatile and Efficient LiDAR-Inertial Odometry and Mapping ...
LIO-SAM学习与运行测试数据集_lio-sam数据集百度网盘-CSDN博客
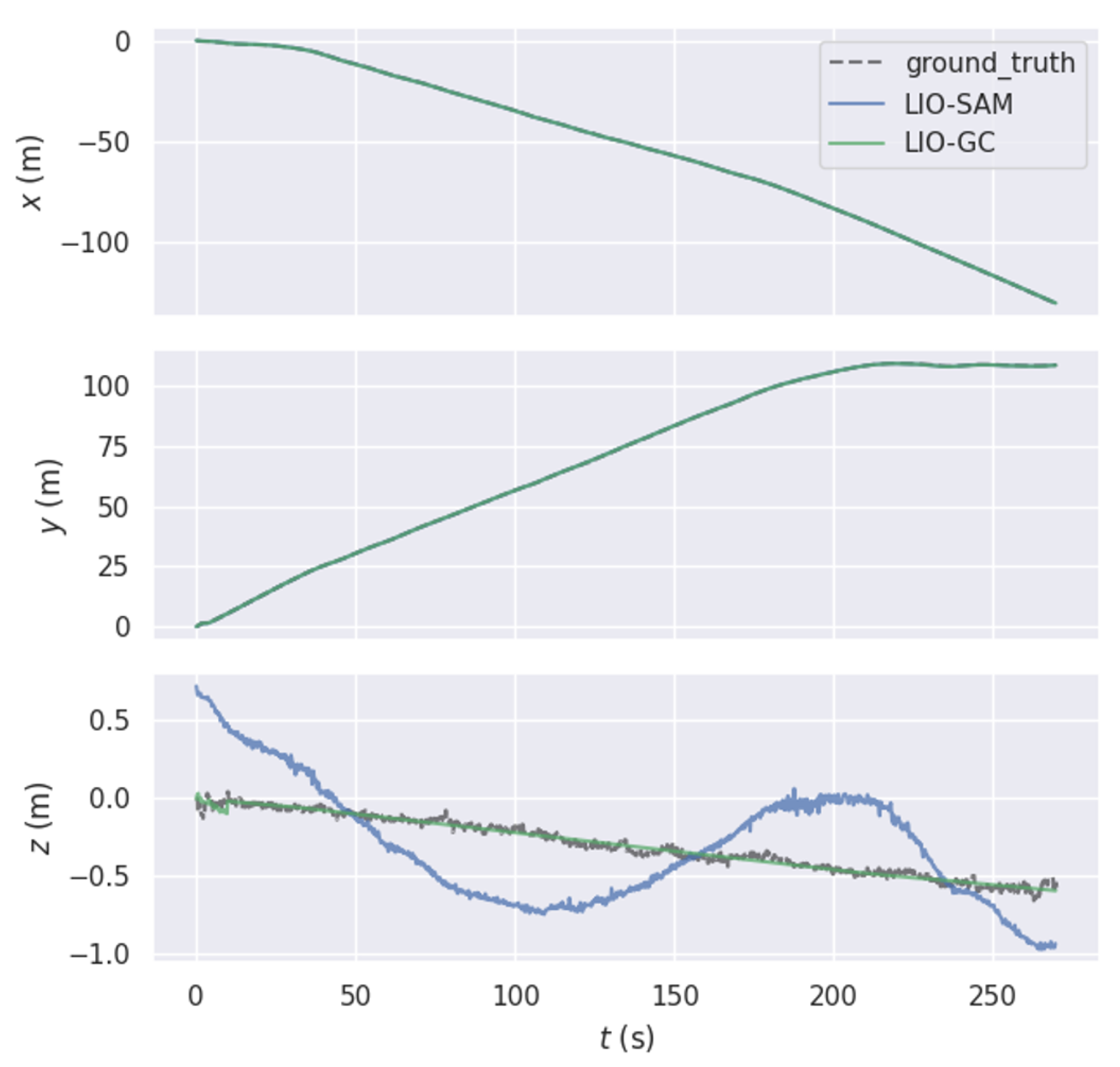
LIO-GC: LiDAR Inertial Odometry with Adaptive Ground Constraints
JiaFan's Blog
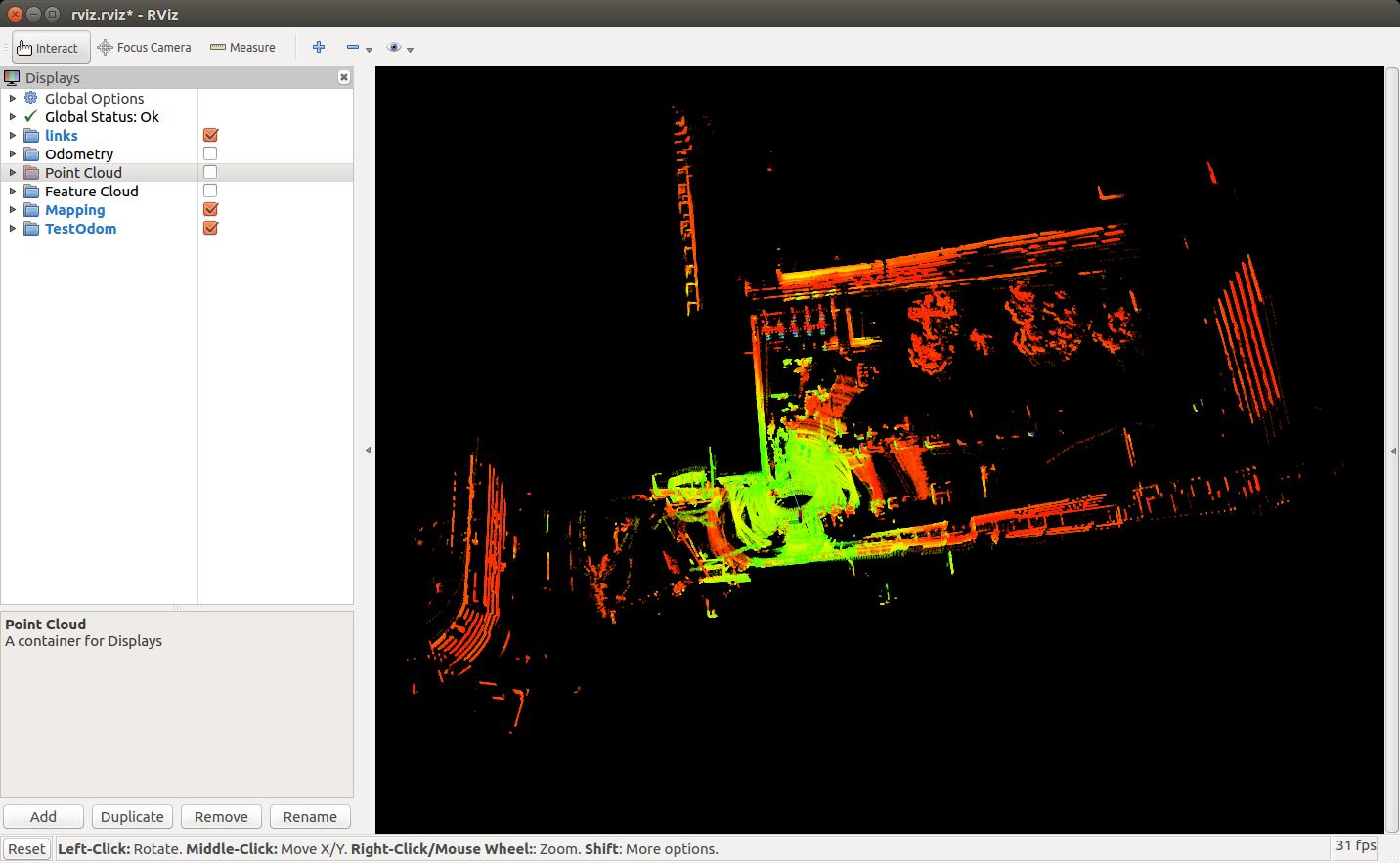
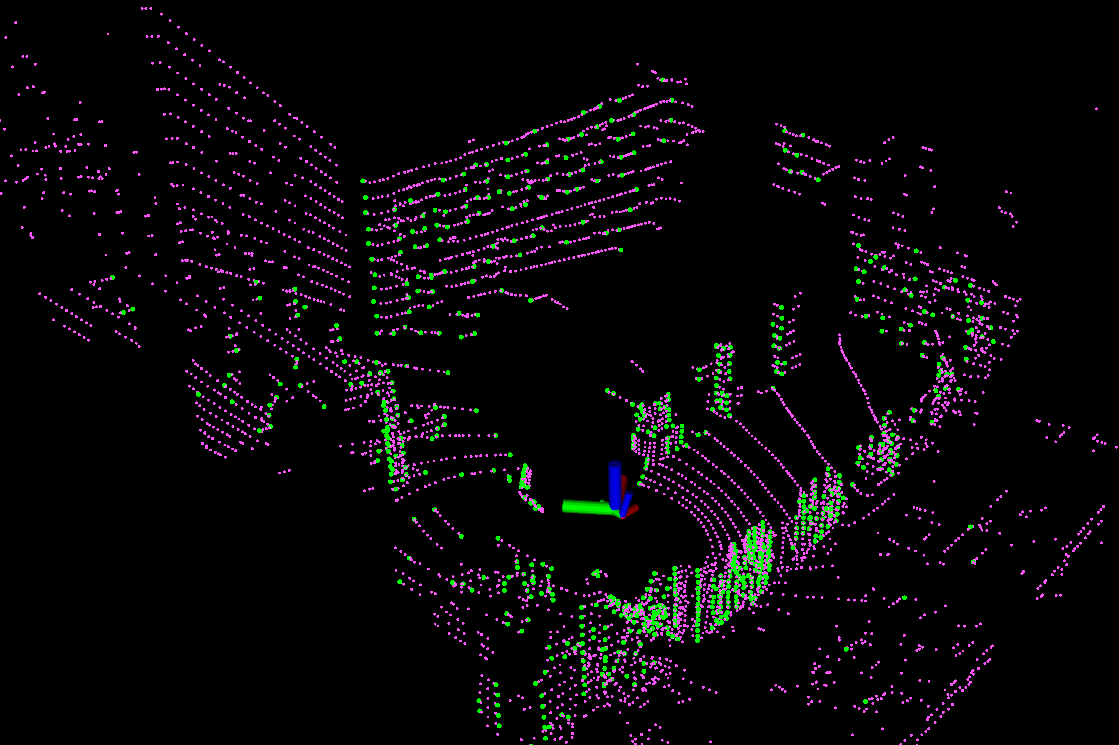
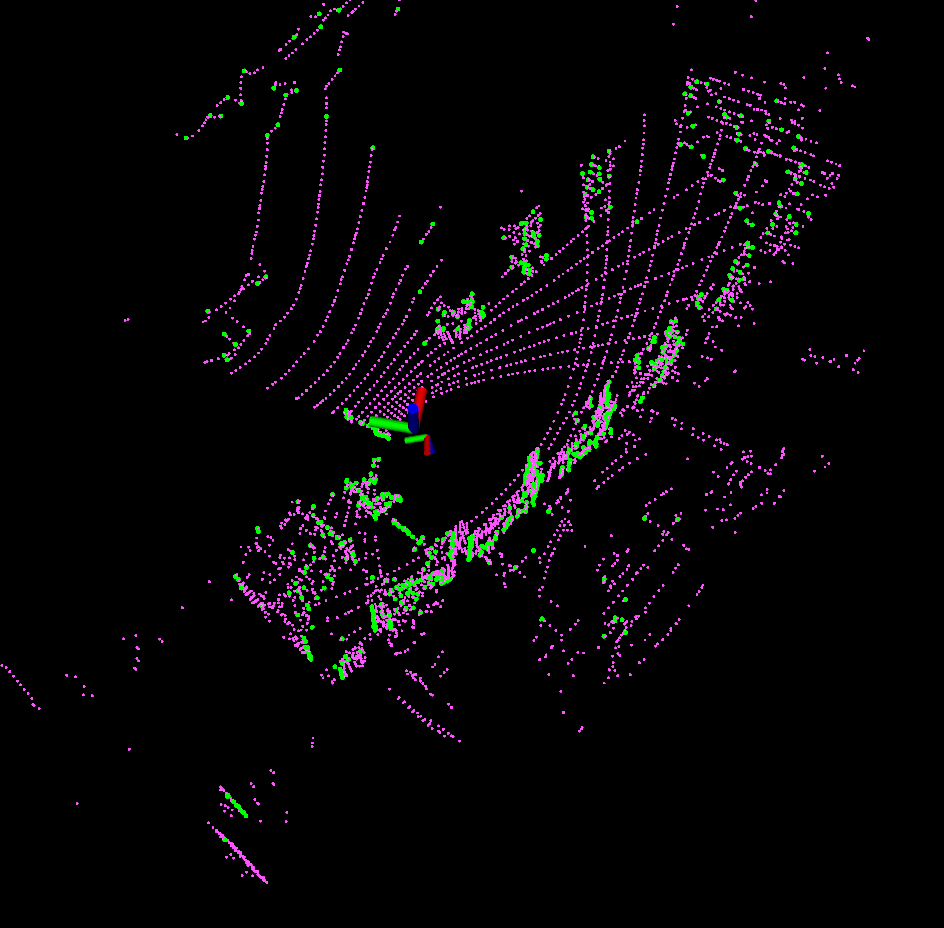
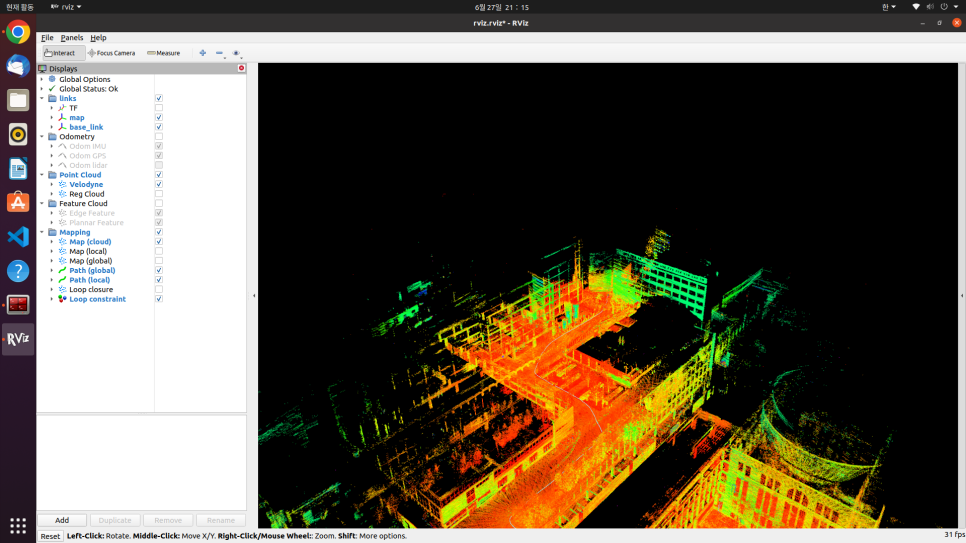
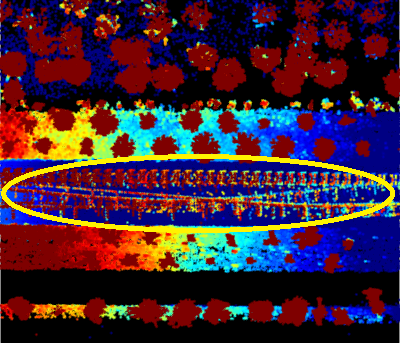
LIO-SAM test results within a simple pipeline environment. LIO-SAM test ...
(PDF) Super Odometry: IMU-centric LiDAR-Visual-Inertial Estimator for ...
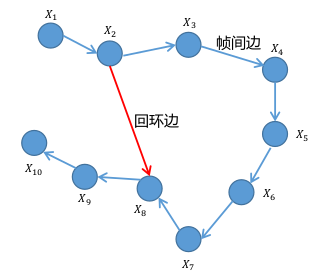
基于lio-sam框架,教你如何进行回环检测及位姿计算 - 知乎
IMU+激光雷达融合使用LIO-SAM建图学习笔记——详细、长文、多图、全流程_liosam-CSDN博客
ROS2与3D-SLAM入门教程-LIO-SAM算法建图 - 创客智造
FT‐LVIO: Fully Tightly coupled LiDAR‐Visual‐Inertial odometry - Zhang ...
GitHub - gisbi-kim/SC-LIO-SAM: LiDAR-inertial SLAM: Scan Context + LIO-SAM
LiDAR Inertial Odometry Based on Indexed Point and Delayed Removal ...
(PDF) Analysis of 3D Modeling Using LiDAR Velodyne for Tree Inventory ...
LIO-SAM代码解读 - 知乎
ubuntu16.04 lio_sam算法 录制自己的数据集构建地图_berry丶的博客-CSDN博客_lio_sam
LIO-SAM论文阅读 | EpsilonJohn's Blog
LIO-SAM - Autoware Documentation
SLAM文献之-LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing ...
LIO-SAM++: A Lidar-Inertial Semantic SLAM with Association Optimization ...
CV-Segment Medicines | Cardiovascular Products - Samproj Pharma
LIO-SAM理论分析与代码解读_lio-sam中使用imu数据去运动畸变的公式-CSDN博客
LTA‐OM: Long‐term association LiDAR–IMU odometry and mapping - Zou ...
[2206.09463] RF-LIO: Removal-First Tightly-coupled Lidar Inertial ...
Fast Lidar Inertial Odometry and Mapping for Mobile Robot SE(2) Navigation
【论文阅读】LIO-SAM Tightly-coupled Lidar Inertial Odometry via Smoothing and ...
LIO-SAM算法详解:IMU融合的激光SLAM技术-CSDN博客
基于darpa subt洞穴仿真环境对比aloam和liosam - 小鱼锅贴 - 博客园