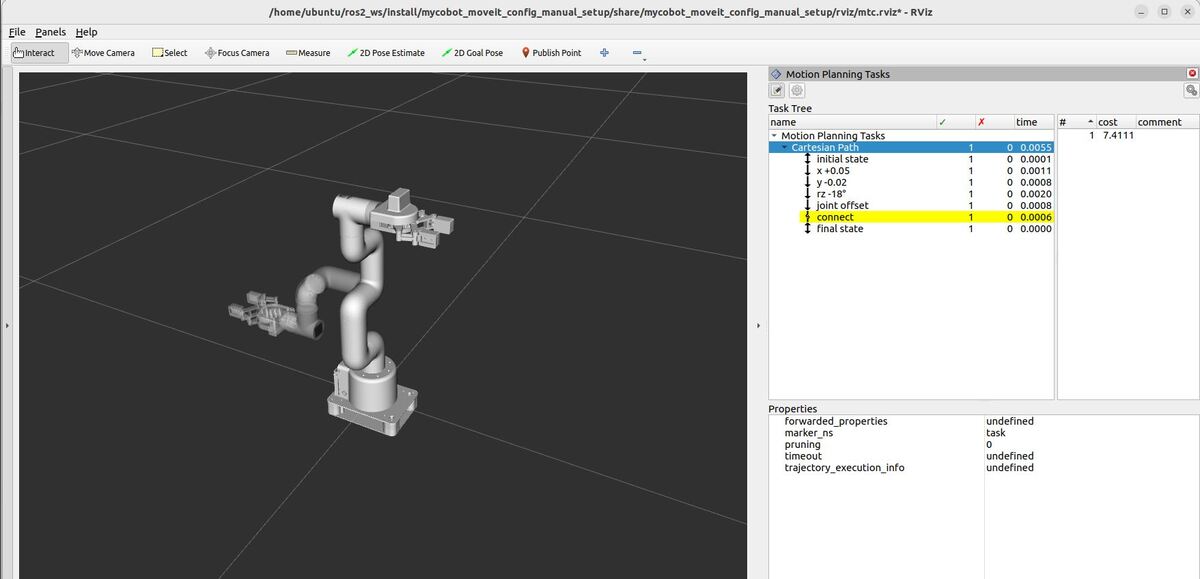
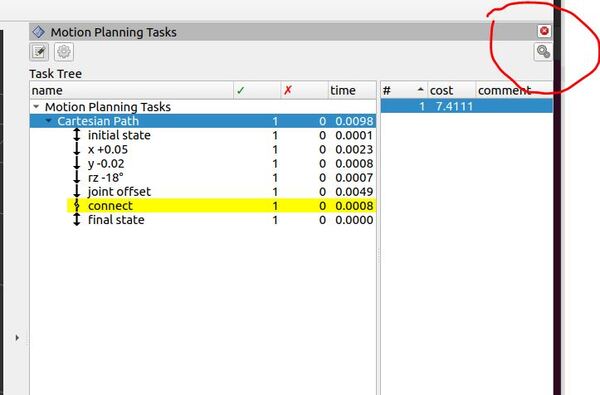
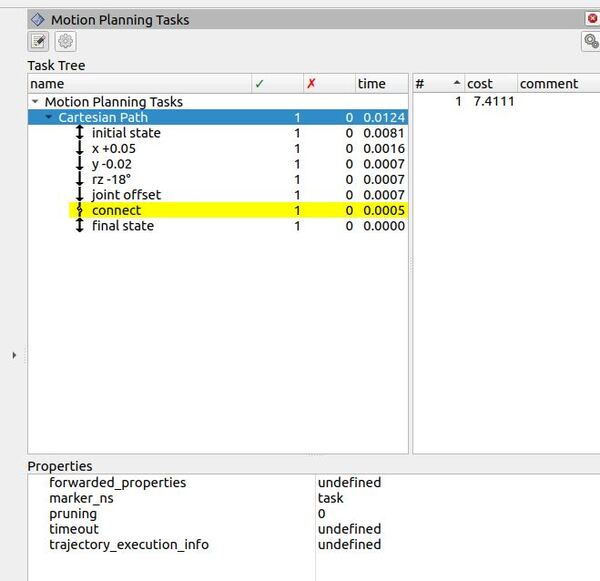
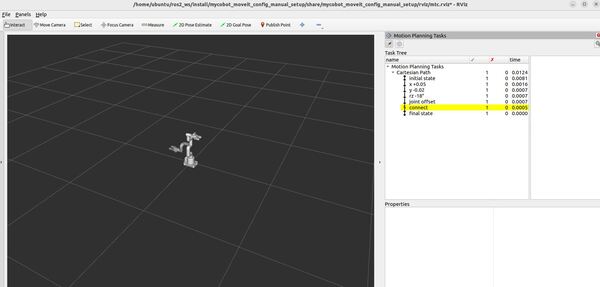
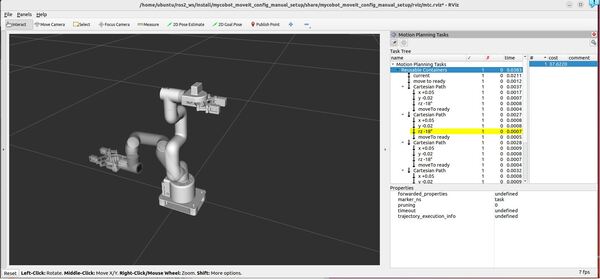
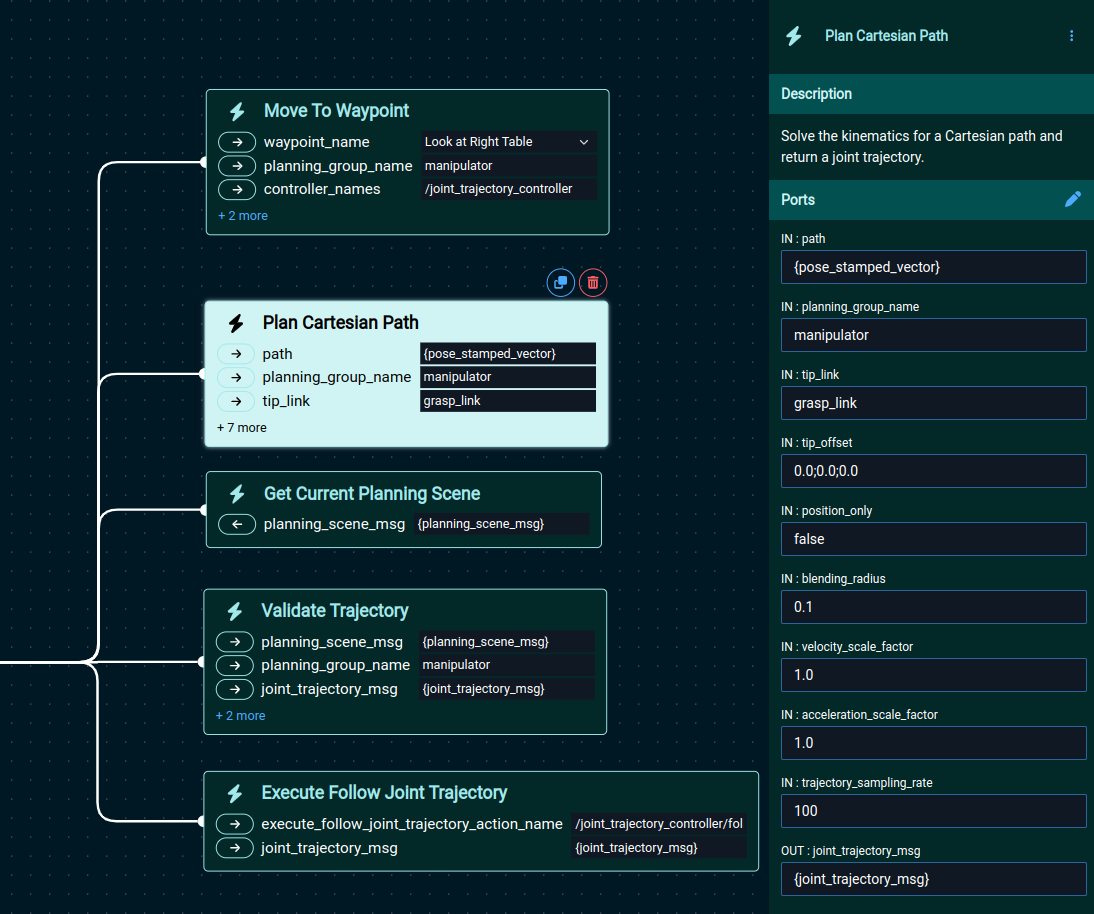
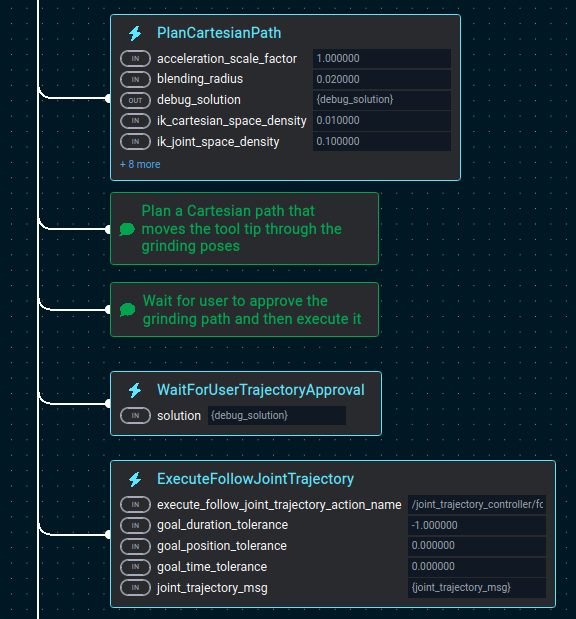
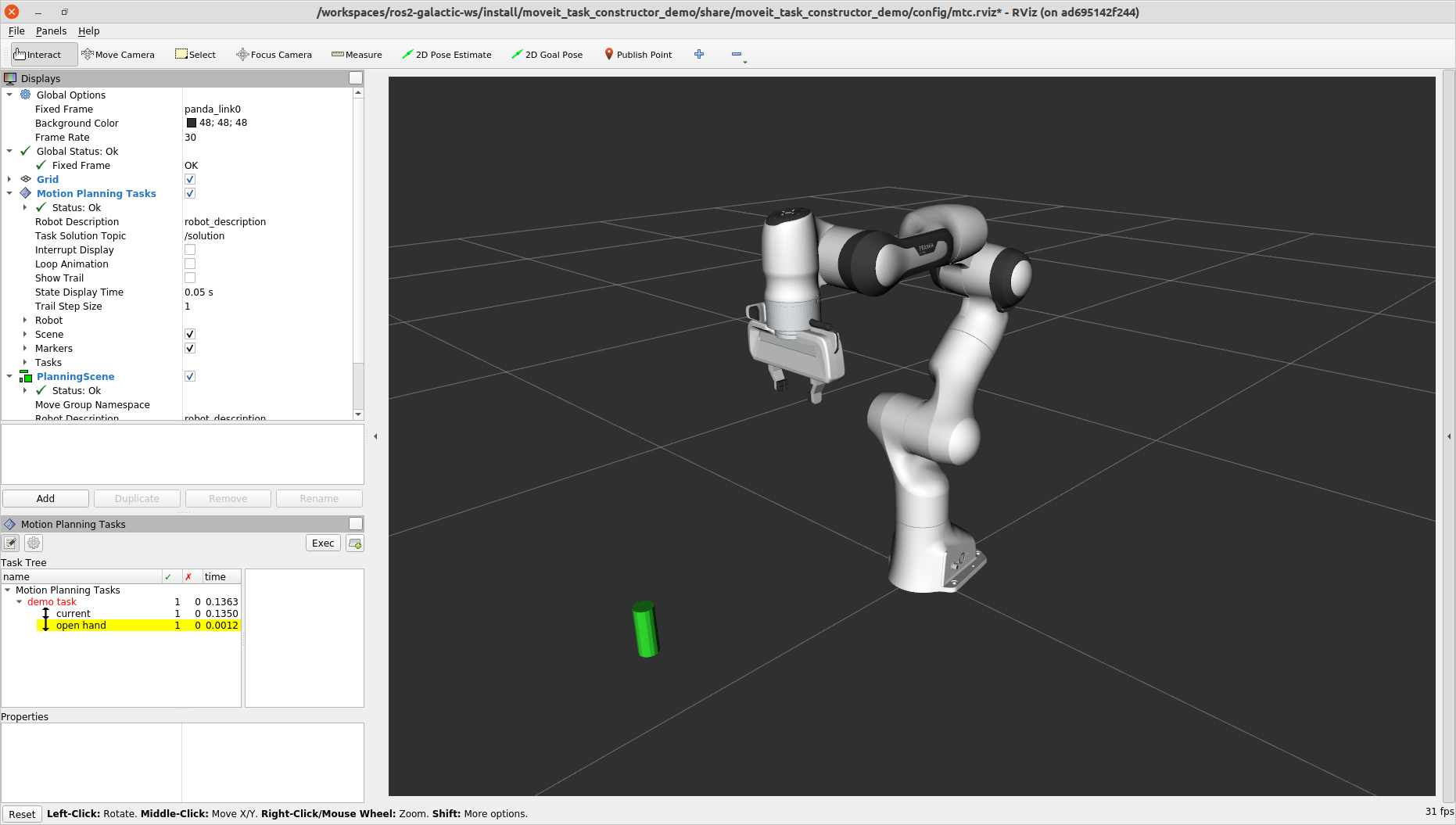
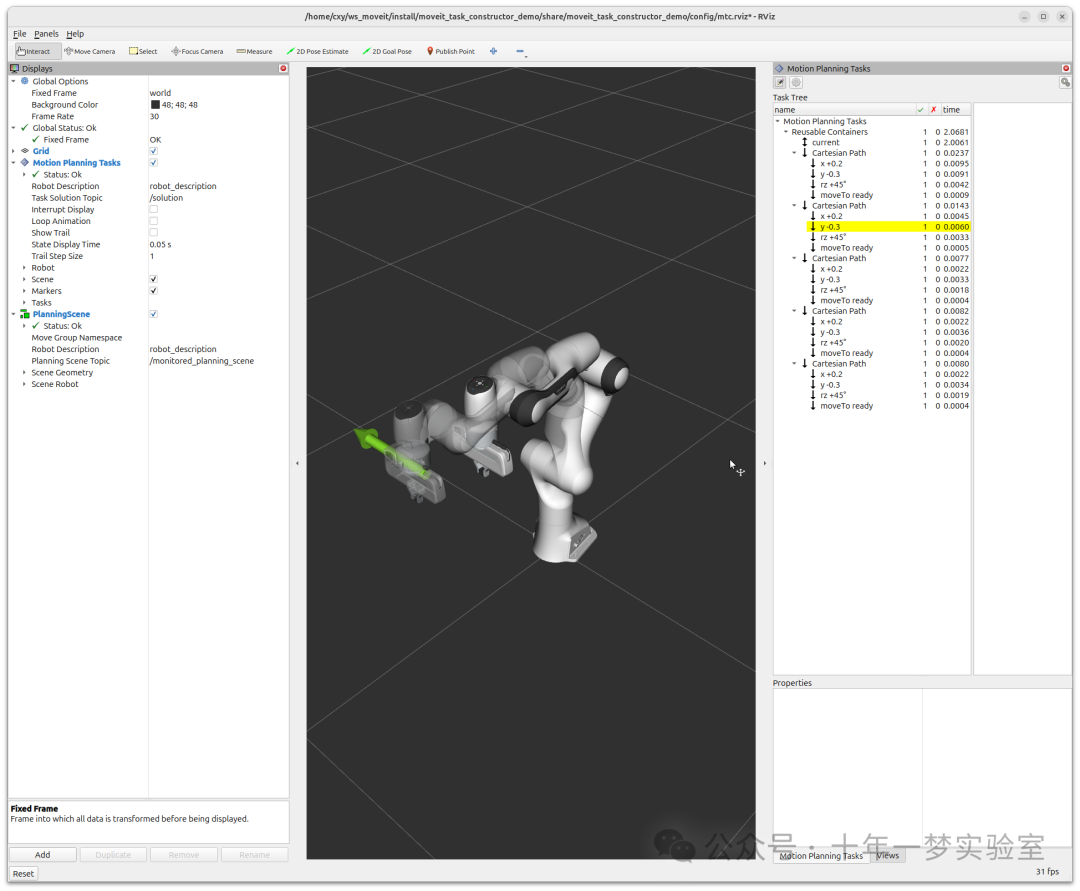
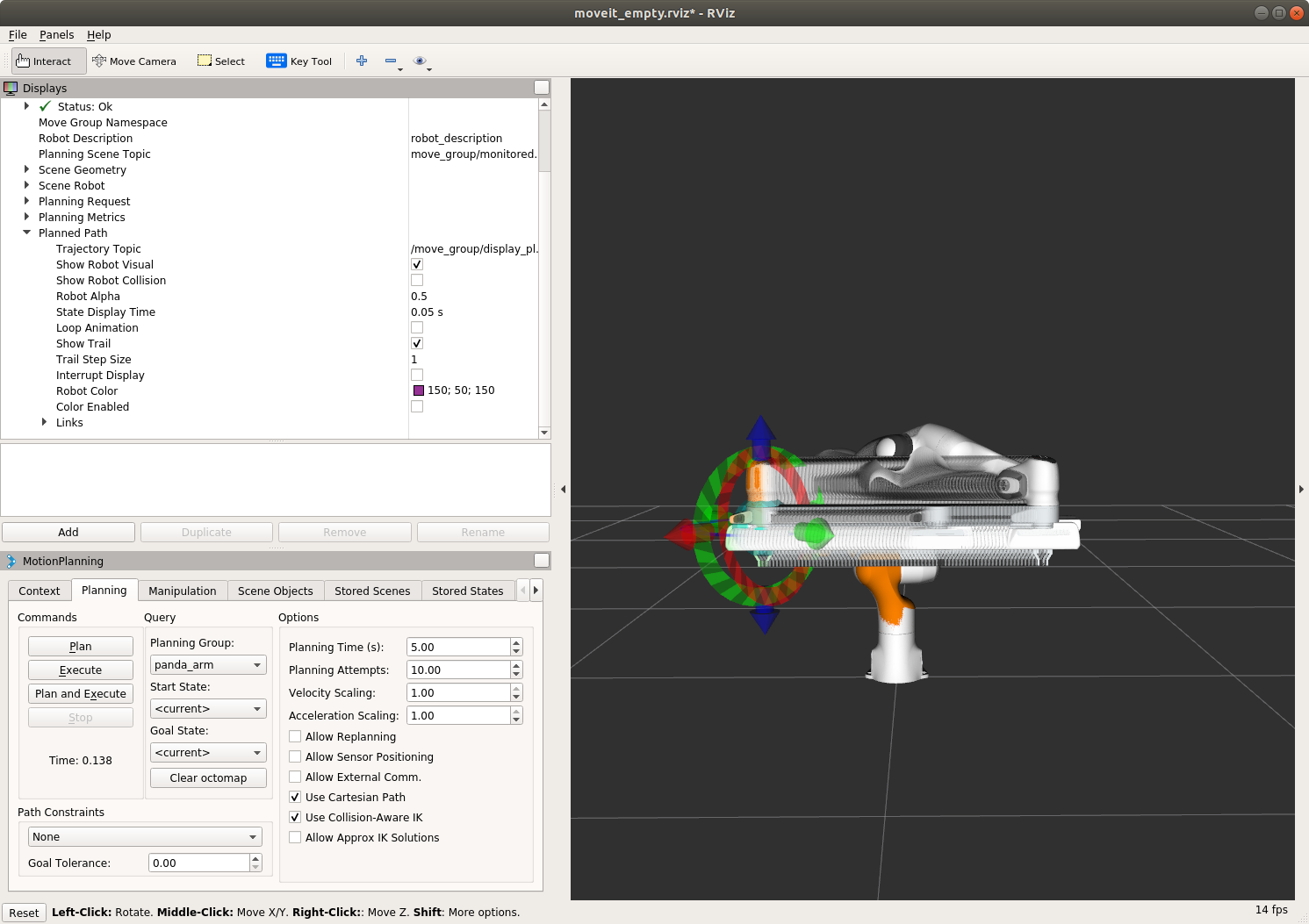
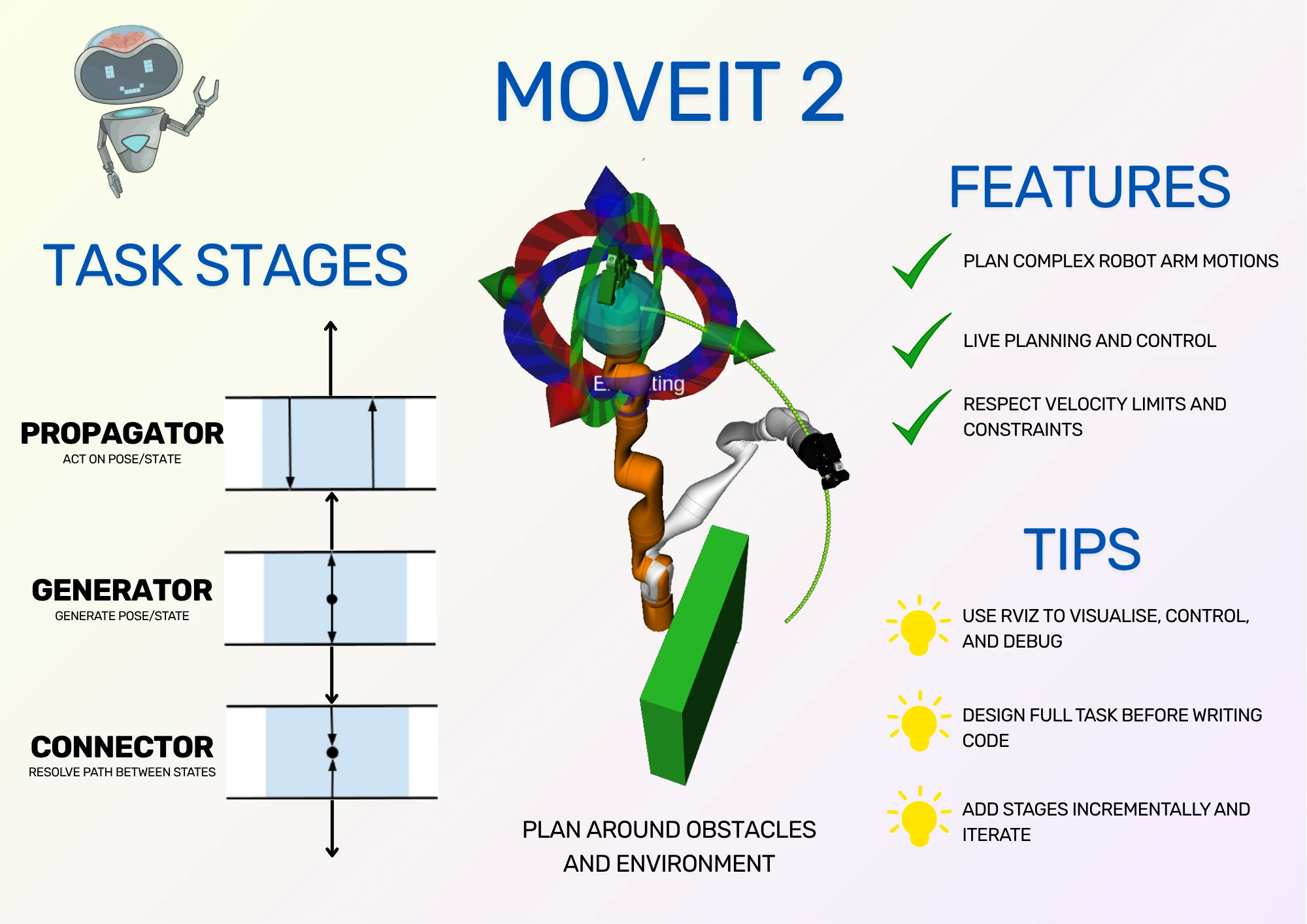
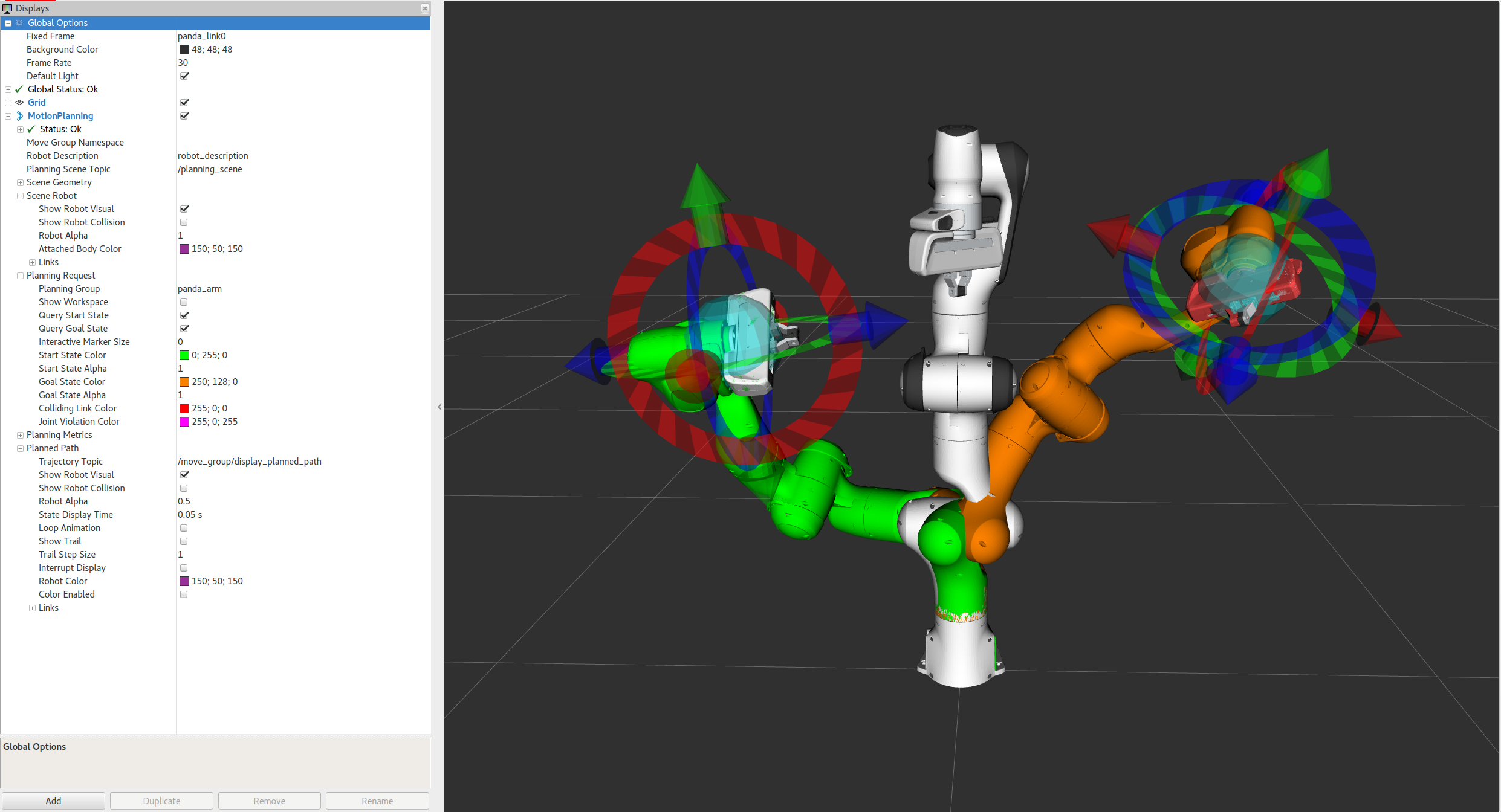
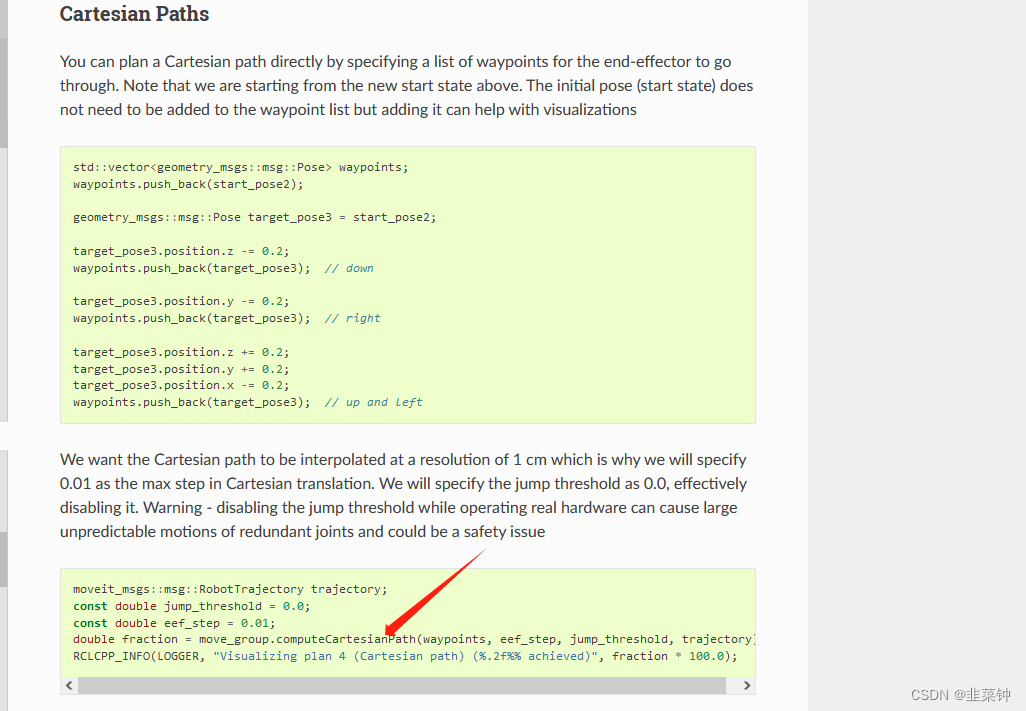
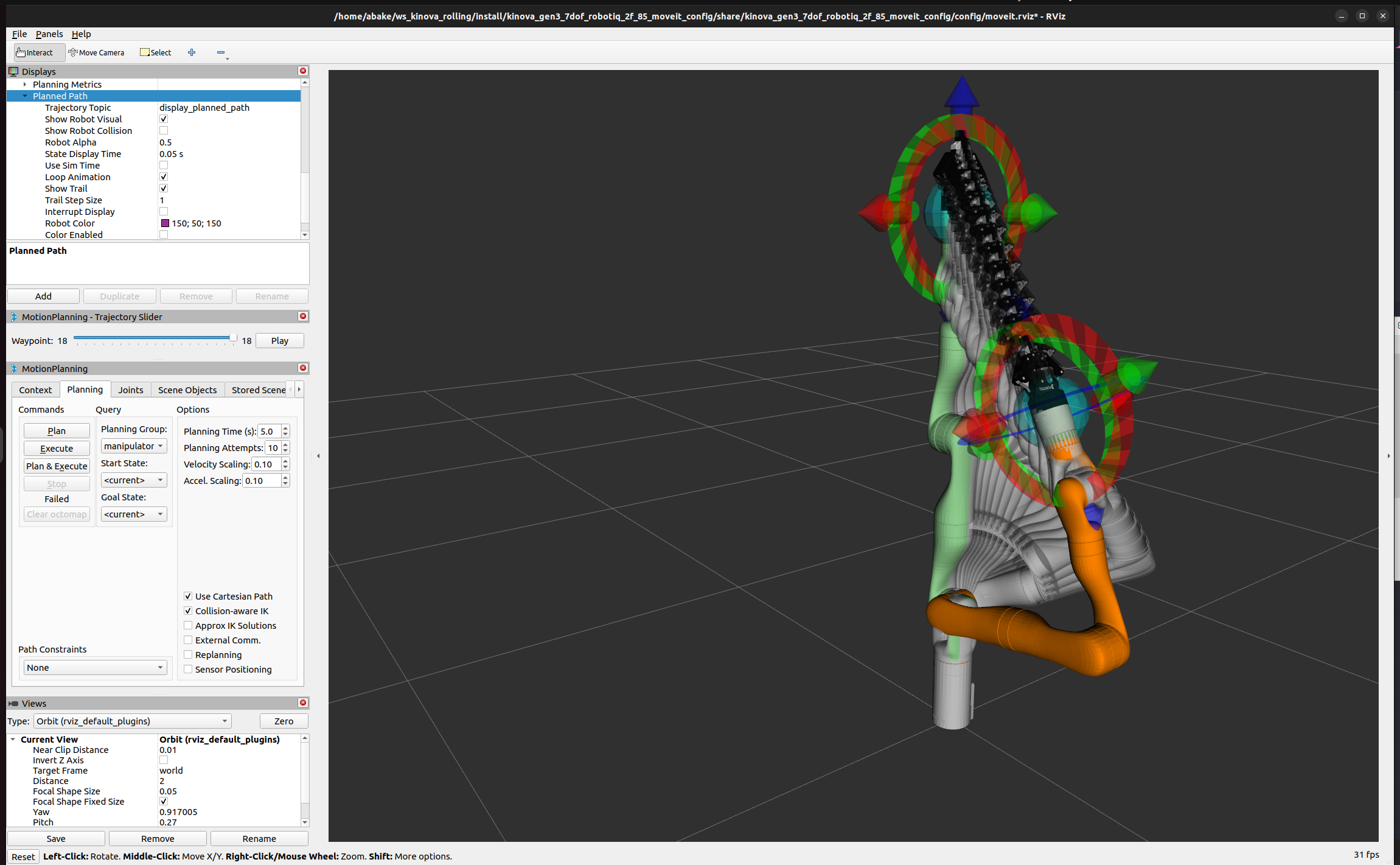
Cartesian Path Planning Using the MoveIt Task Constructor
Cartesian Path Planning – ROS 2 Jazzy MoveIt Task Constructor - YouTube
Cartesian Path Planning – ROS 2 Jazzy MoveIt Task Constructor
MoveIt Circular path Planning using Cartesian Paths - ROS - YouTube
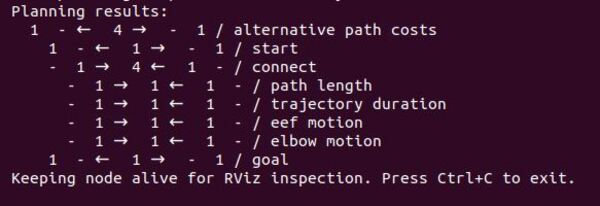
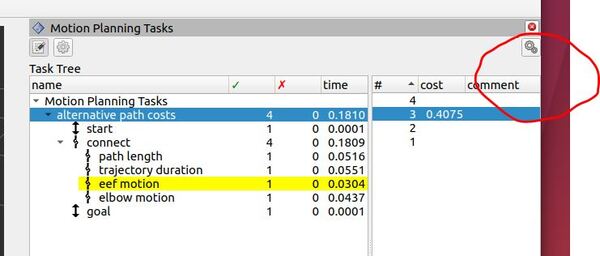
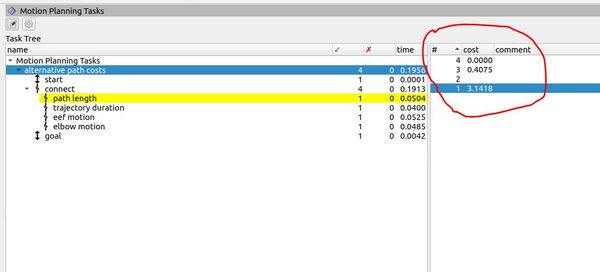
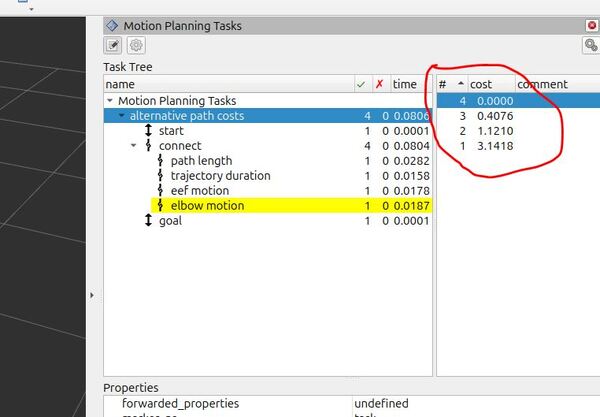
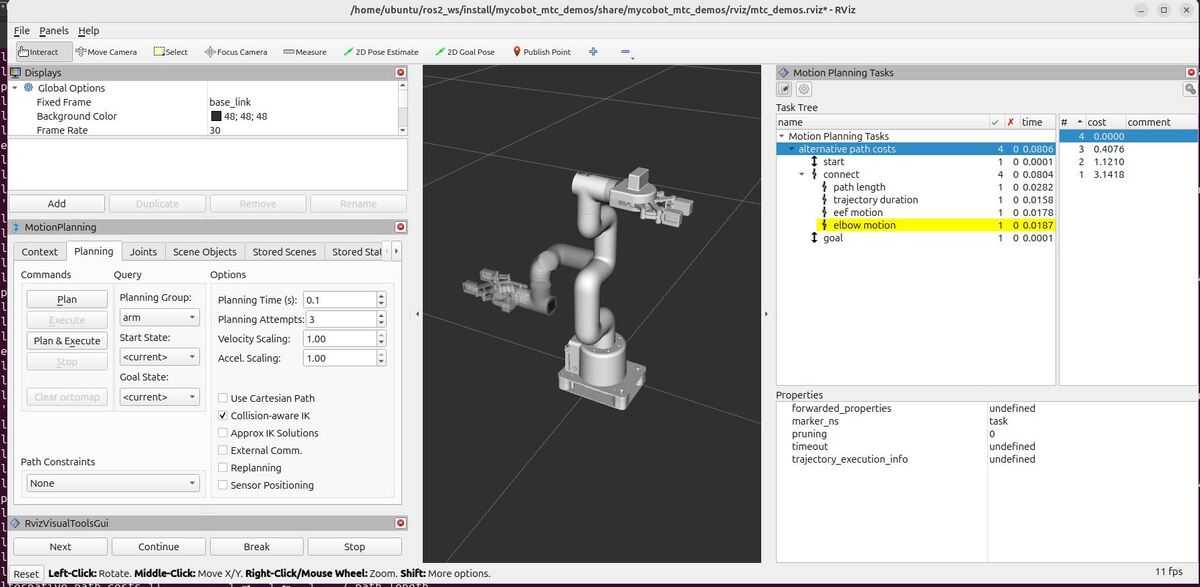
Create Alternative Paths Using the MoveIt Task Constructor
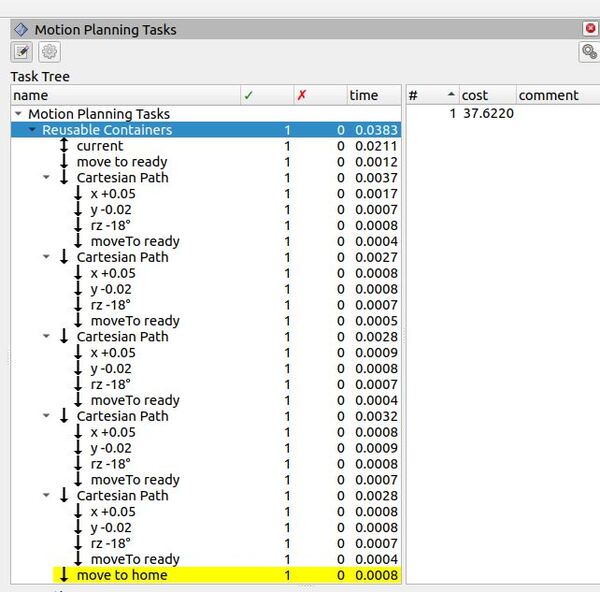
Reusing Motion Plans Using the MoveIt Task Constructor
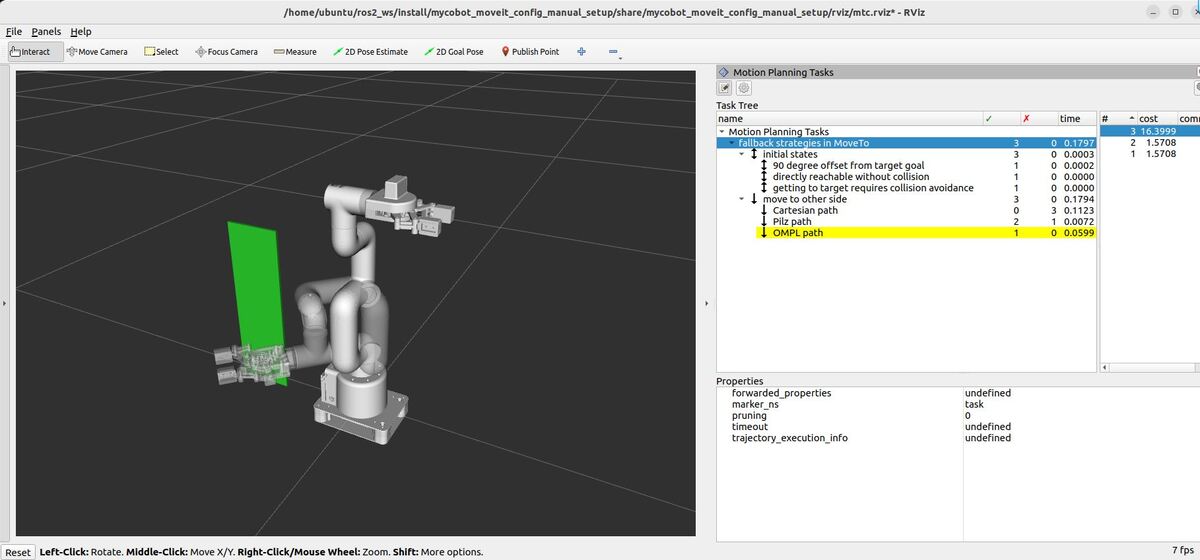
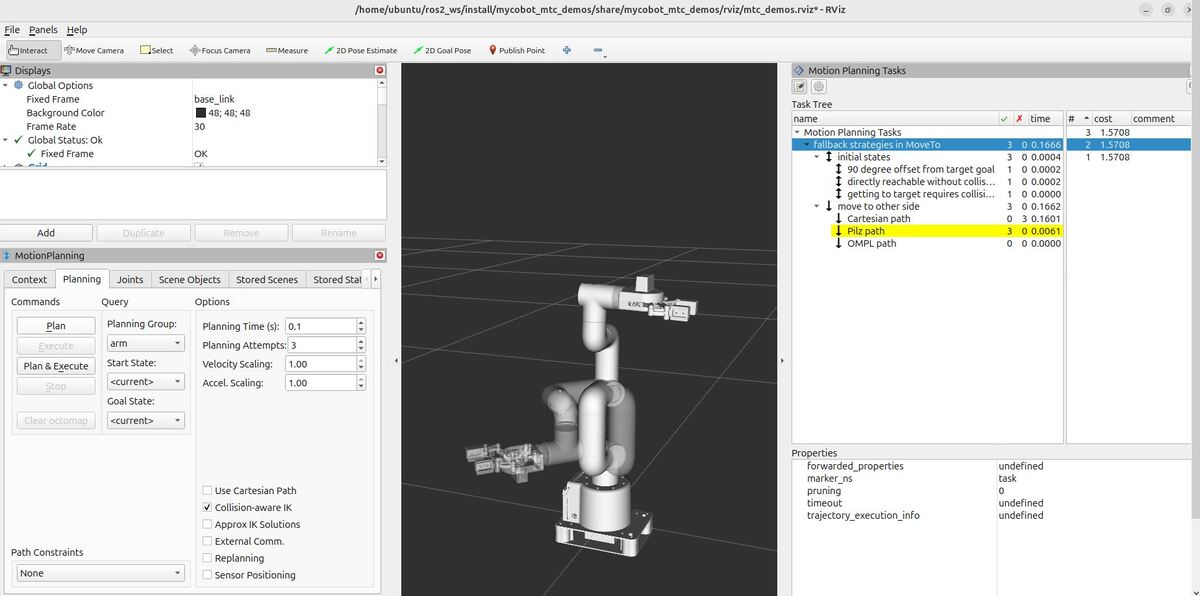
Create Fallback Strategies Using the MoveIt Task Constructor
Solve Inverse Kinematics Using the MoveIt Task Constructor
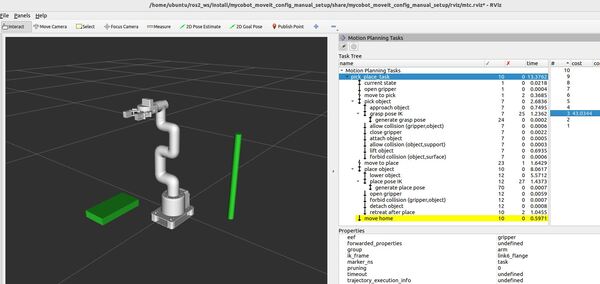
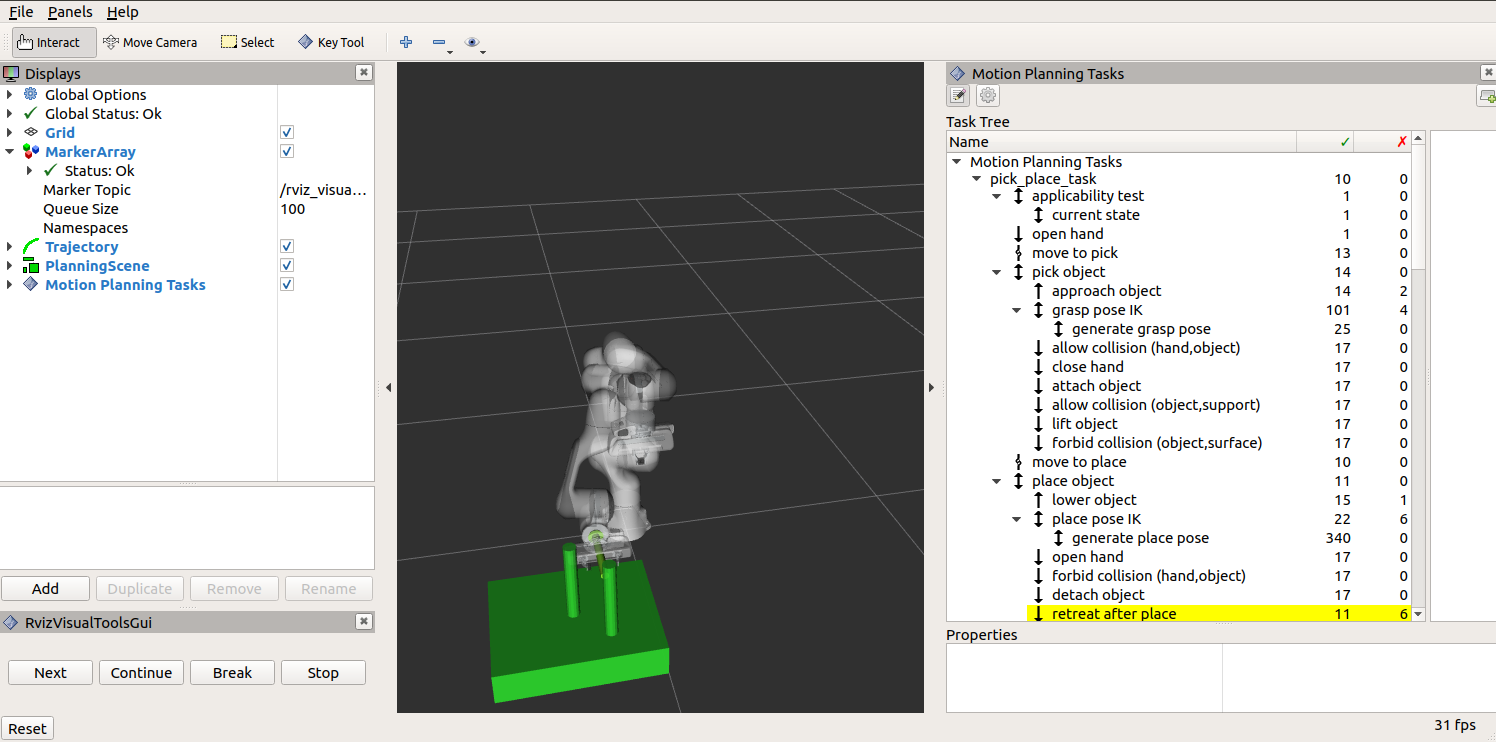
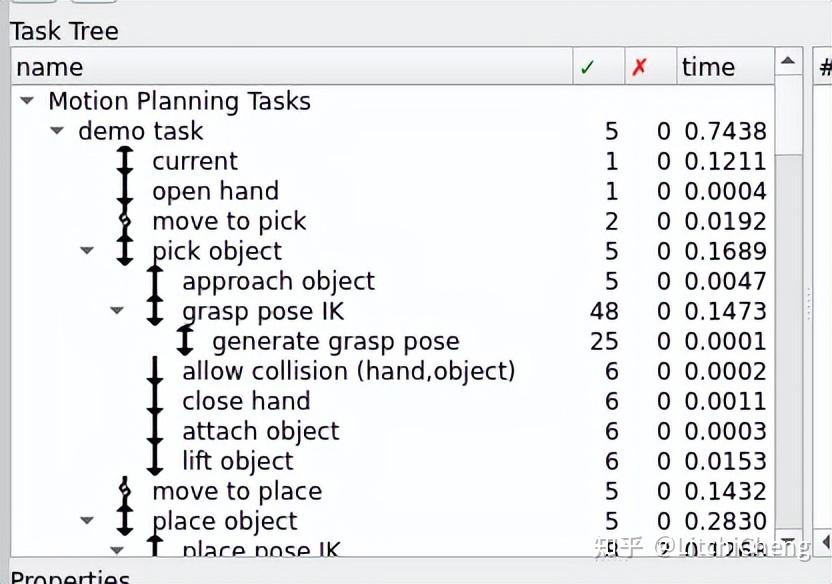
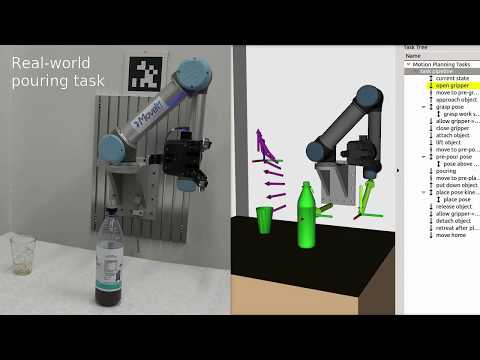
Pick and Place with the MoveIt Task Constructor for ROS 2
Pick and Place with the MoveIt Task Constructor for ROS 2 – Automatic ...
ROS Development: motion planning using python cartesian path with ...
Task and Motion Planning using MoveIt Pro - YouTube
Cartesian Path Following | MoveIt Pro Docs
Reusing Motion Plans – ROS 2 Jazzy MoveIt Task Constructor
Alternative Paths – ROS 2 Jazzy MoveIt Task Constructor
MoveIt Task Constructor — moveit_tutorials Noetic documentation
(PDF) MoveIt! Task Constructor for Task-Level Motion Planning
5 introducing the cartesian path planner plug-in for move it-v2 | PPT
MoveIt Task Constructor (MTC) | MoveIt Pro Docs
MoveIt Task Constructor — MoveIt Documentation: Rolling documentation
Pick and Place with MoveIt Task Constructor — MoveIt Documentation ...
[ROS-MoveIt] Cartesian path planning with UR5 - YouTube
Fallback Strategies – ROS 2 Jazzy MoveIt Task Constructor
Final results GSoC 2014: Cartesian Path Planner Plug in for MoveIt ...
trajectory planning through path constraints · Issue #1707 · moveit ...
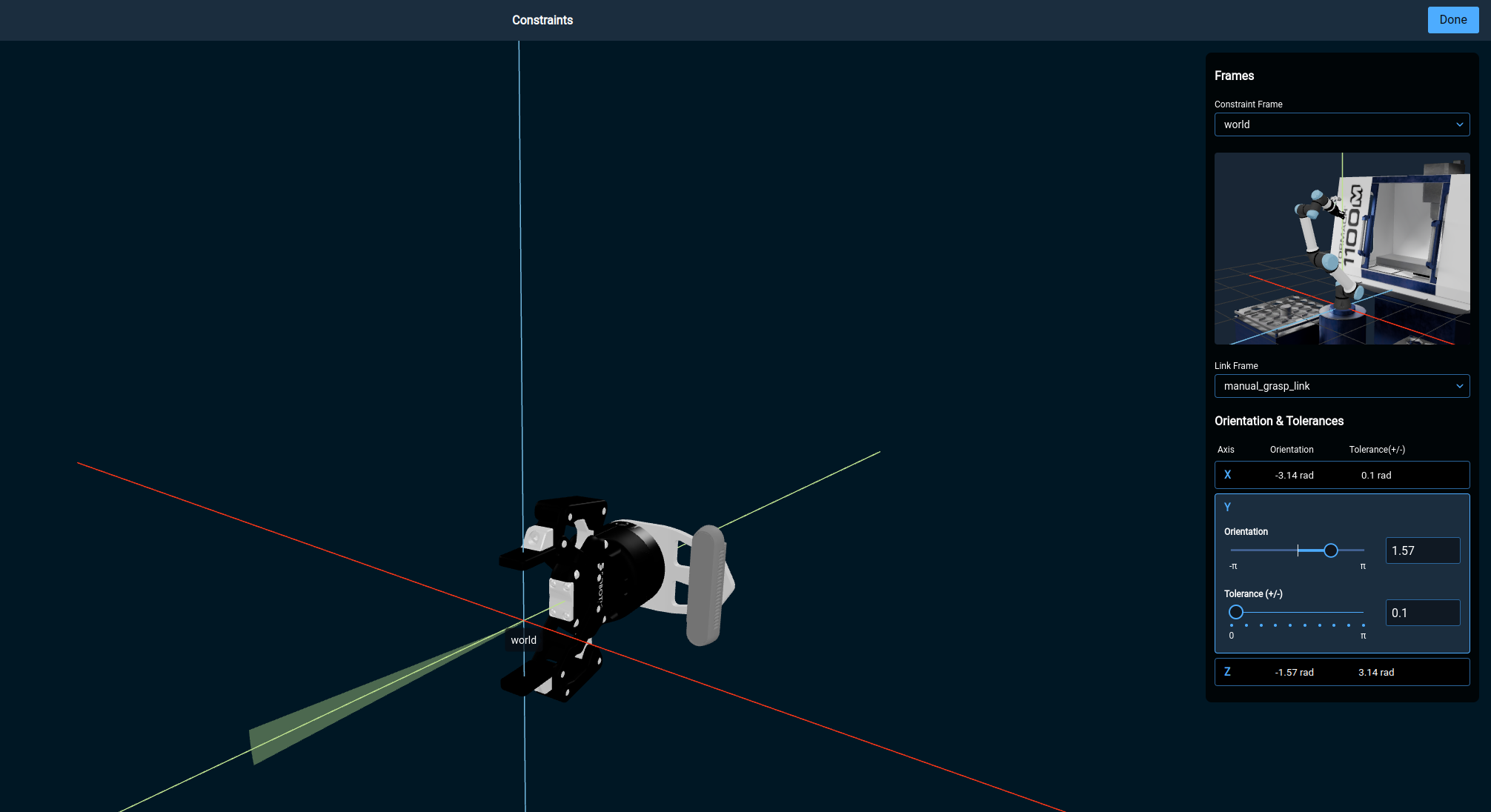
Planning With Orientation Constraints | MoveIt Pro Docs
Open Class - Cartesian Planning with MoveIt2 - Training & Education ...
【MoveIt 2】使用 MoveIt 任务构造器(MoveIt Task Constructor)进行拾取和放置-CSDN博客
Tutorial 4 - Motion Planning | MoveIt Pro Docs
Cartesian Planning with MoveIt2 | ROS2 Developers Open Class #175 - YouTube
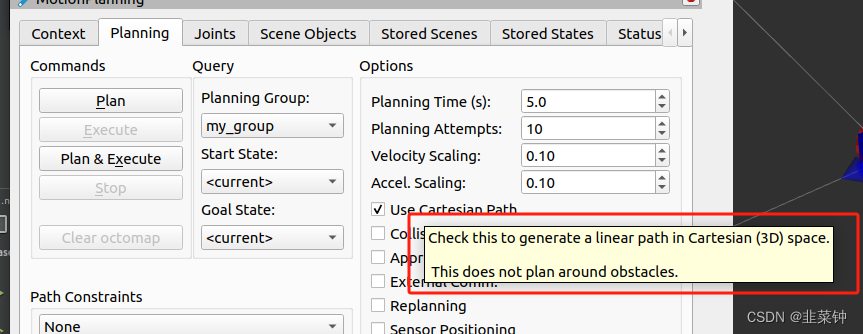
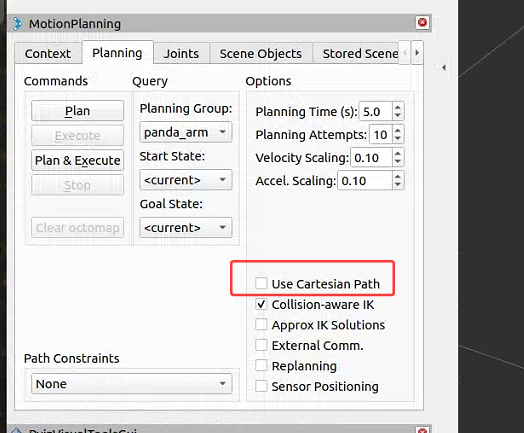
MoveIt的【Use Cartesian Path】选项及computeCartesianPath函数-CSDN博客
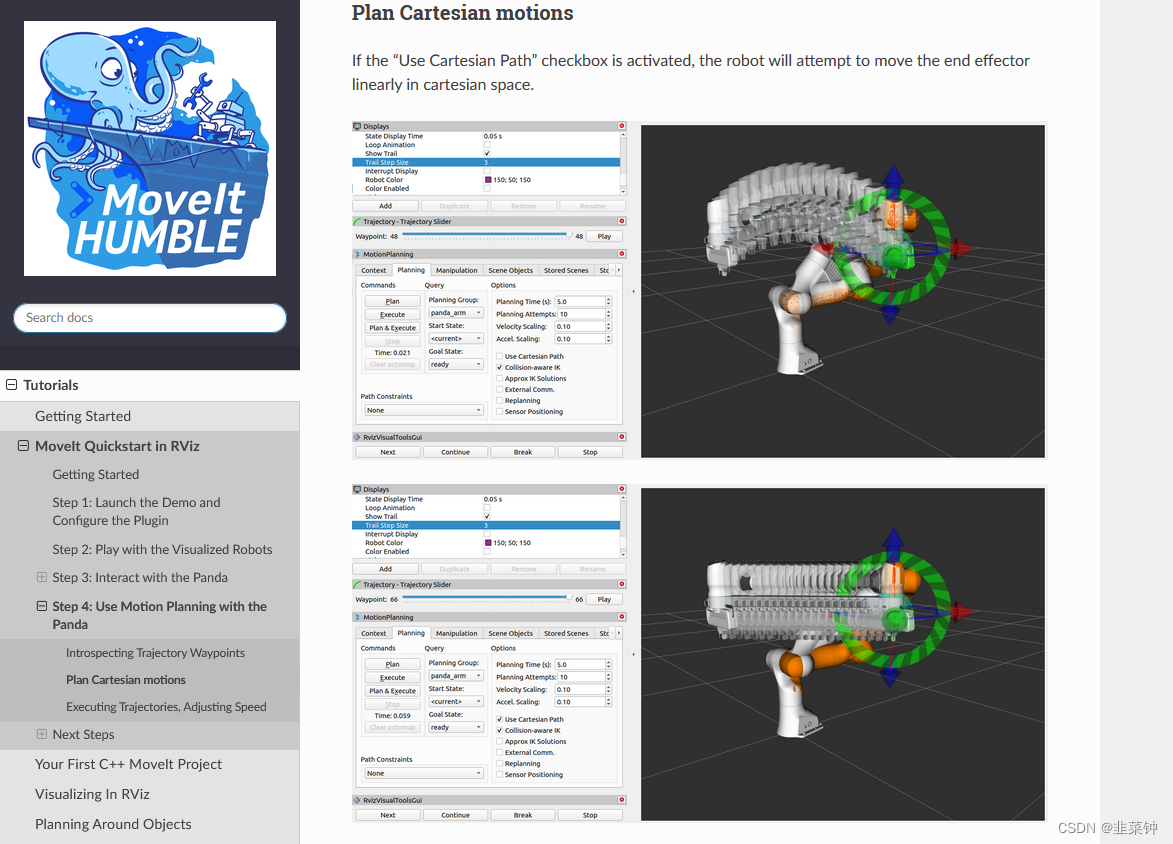
MoveIt Quickstart in RViz — moveit_tutorials Noetic documentation
Constructing Tasks with MoveIt | Mike Likes Robots
MoveIt Quickstart in RViz — MoveIt Documentation: Humble documentation
ROS2 机械臂 MoveIt 开发必看!用 MTC 实现抓取任务规划的完整流程(附代码解析) - 知乎
rotation around given point as task · Issue #453 · moveit/moveit_task ...
MoveIt Quickstart in RViz — MoveIt Documentation: Rolling documentation
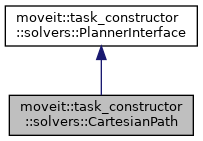
MTC: moveit::task_constructor::solvers::CartesianPath Class Reference
GitHub - moveit/moveit_task_constructor: A hierarchical multi-stage ...
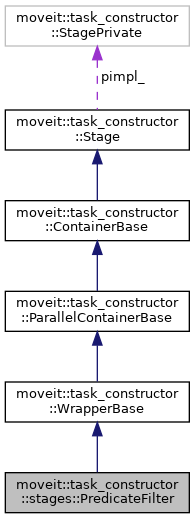
MTC: moveit::task_constructor::stages::PredicateFilter Class Reference
MTC: moveit::task_constructor::stages::ModifyPlanningScene Class Reference
core: moveit::task_constructor::stages::ModifyPlanningScene Class Reference
Moveit2使用说明(C++)_moveit2使用方法-CSDN博客
MTC: moveit::task_constructor::solvers::MultiPlanner Class Reference
MTC: moveit::task_constructor::solvers::PlannerInterface Class Reference
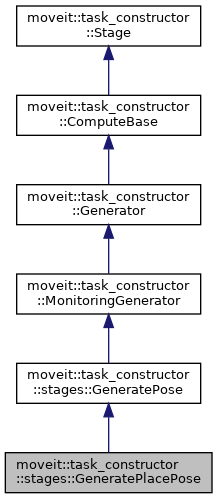
MTC: moveit::task_constructor::stages::GeneratePlacePose Class Reference
MTC: moveit::task_constructor::stages::SimpleUnGrasp Class Reference
moveit2: moveit::planning_interface::MoveGroupInterface Class Reference
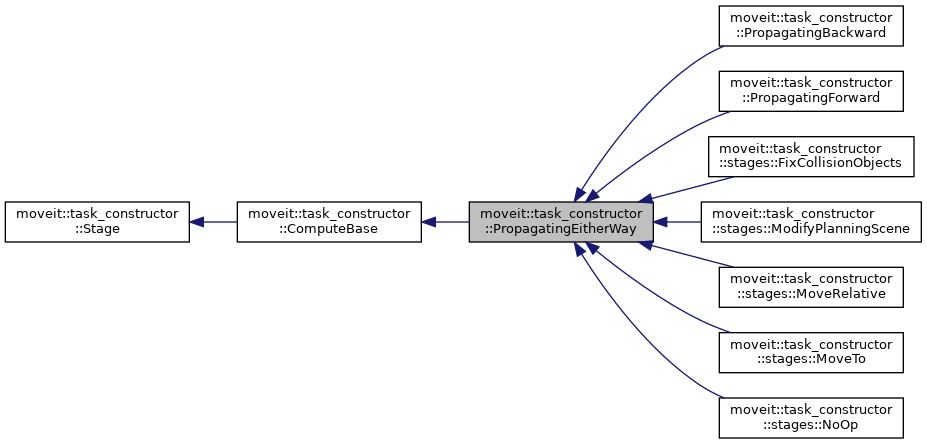
MTC: moveit::task_constructor::PropagatingEitherWay Class Reference
core: moveit::task_constructor::CostTerm Class Reference
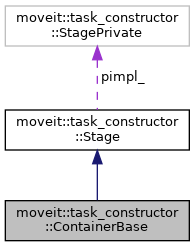
MTC: moveit::task_constructor::ContainerBase Class Reference
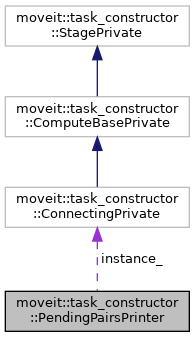
MTC: moveit::task_constructor::PendingPairsPrinter Struct Reference
MTC: moveit::task_constructor::SolutionBase Class Reference
moveit2: moveit::core::CartesianInterpolator Class Reference
MTC: moveit::task_constructor::FallbacksPrivatePropagator Struct Reference
moveit2_tutorials/doc/tutorials/pick_and_place_with_moveit_task ...
MTC: moveit::task_constructor::Interface Class Reference
MTC: moveit::task_constructor::PropertySerializerBase Class Reference
MTC: moveit::task_constructor::cost::Constant Class Reference